MI DIVP API
1. OVERVIEW¶
1.1. Module Description¶
DIVP supports pre-processing of an input image, such as cropping, image pixel format conversion, rotation, mirroring, etc., and separate scaling processing for each channel, and finally outputs a variety of images with different resolutions.
The specific image processing functions supported by DIVP include image cropping, image pixel format conversion, image rotation, image mirror operation, and image stretching and scaling.
1.2. Flow Chart¶

Note:
Rotation is NOT supported by chip series including Macaron、Taiyaki、Takoyaki、Ispahan series.
1.3. Keyword¶
-
Crop
Image cropping
-
Rotate
Image rotation
-
Scaling up/down
Image stretching and scaling
-
Mirror/Flip
Image mirror operation
-
Pixel Format Conversion
Image pixel format conversion
2. API LIST¶
The MI DIVP module provides the following APIs:
| Name of API | Function |
|---|---|
| MI_DIVP_CreateChn | Create a DIVP channel. |
| MI_DIVP_DestroyChn | Destroy a DIVP channel. |
| MI_DIVP_SetChnAttr | Set the DIVP channel attribute. |
| MI_DIVP_GetChnAttr | Get the DIVP channel attribute. |
| MI_DIVP_StartChn | Start a channel. |
| MI_DIVP_StopChn | Stop a channel. |
| MI_DIVP_SetOutputPortAttr | Set the DIVP output port attribute. |
| MI_DIVP_GetOutputPortAttr | Get the DIVP output port attribute. |
| MI_DIVP_RefreshChn | Refresh a channel in pause state. |
| MI_DIVP_StretchBuf | Stretch or crop image in specified memory to target memory |
| MI_DIVP_InitDev | Initialize DIVP device |
| MI_DIVP_DeInitDev | De-initialize DIVP device |
| MI_DIVP_StretchBufEx | Scale, stretch, crop the image data in the specified memory area, and output to the target memory |
2.1. MI_DIVP_CreateChn¶
-
Function
Create a new DIVP channel.
-
Syntax
MI_S32 MI_DIVP_CreateChn ( MI_DIVP_CHN DivpChn, MI_DIVP_ChnAttr_t* pstAttr);
-
Parameter
Parameter Name Description Input/Output DivpChn Return the ID of the created DIVP channel. DIVP supports maximum 6 channels, parameter range: [0, 5]. Input pstAttr DIVP channel attribute pointer, used to set the attribute of the created channel. Input -
Return Value
-
MI_SUCCESS: DIVP channel created successfully
-
MI_DIVP_ERR_FAILED: Attempt to create DIVP channel failed
-
MI_DIVP_ERR_NO_RESOUCE: System resource not enough; attempt to create DIVP channel failed
-
-
Requirement
-
Header: mi_divp.h, mi_divp_datatype.h
-
Library: libmi_divp.so
-
-
Note
The DIVP module supports maximum 6 channels. When the total number of channels created exceeds 6 or the system resource is insufficient, the channel creation task will fail.
-
Example
MI_DIVP_CHN u32ChnId = 0; MI_DIVP_ChnAttr_t stDivpChnAttr; MI_DIVP_OutputPortAttr_t stDivpOutputPortAttr; memset(&stDivpChnAttr,0,sizeof(MI_DIVP_ChnAttr_t)); memset(&stDivpOutputPortAttr,0,sizeof(MI_DIVP_OutputPortAttr_t)); stDivpChnAttr.bHorMirror = false; stDivpChnAttr.bVerMirror = false; stDivpChnAttr.eDiType = E_MI_DIVP_DI_TYPE_OFF; stDivpChnAttr.eRotateType = E_MI_SYS_ROTATE_90; stDivpChnAttr.eTnrLevel = E_MI_DIVP_TNR_LEVEL_OFF; stDivpChnAttr.stCropRect.u16X = 0; stDivpChnAttr.stCropRect.u16Y = 0; stDivpChnAttr.stCropRect.u16Width = 1280; stDivpChnAttr.stCropRect.u16Height = 720; stDivpChnAttr.u32MaxWidth = 1920; stDivpChnAttr.u32MaxHeight = 1080; MI_DIVP_CreateChn(u32ChnId,&stDivpChnAttr); MI_DIVP_GetChnAttr(u32ChnId,&stDivpChnAttr); stDivpChnAttr.stCropRect.u16X = 0; stDivpChnAttr.stCropRect.u16Y = 0; stDivpChnAttr.stCropRect.u16Width = 1920; stDivpChnAttr.stCropRect.u16Height = 1080; MI_DIVP_SetChnAttr(u32ChnId,&stDivpChnAttr); stDivpOutputPortAttr.eCompMode = E_MI_SYS_COMPRESS_MODE_NONE; stDivpOutputPortAttr.ePixelFormat = E_MI_SYS_PIXEL_FRAME_YUV422_YUYV; stDivpOutputPortAttr.u32Width = 1920; stDivpOutputPortAttr.u32Height = 1080; MI_DIVP_SetOutputPortAttr(u32ChnId,&stDivpOutputPortAttr); MI_DIVP_StartChn(u32ChnId); //exit flow MI_DIVP_StopChn(u32ChnId); MI_DIVP_DestroyChn(u32ChnId);
-
Related API
2.2. MI_DIVP_DestroyChn¶
-
Function
Destroy a DIVP channel.
-
Syntax
MI_S32 MI_DIVP_DestroyChn(MI_DIVP_CHN DivpChn);
-
Parameter
Parameter Name Description Input/Output DivpChn ID of the destroyed DVIP channel Input -
Return Value
-
MI_SUCCESS: DVIP channel destroyed successfully
-
MI_DIVP_ERR_FAILED: Attempt to destroy DVIP channel failed
-
-
Requirement
-
Header: mi_divp.h, mi_divp_datatype.h
-
Library: libmi_divp.so
-
-
Related API
2.3. MI_DIVP_SetChnAttr¶
-
Function
Set the DIVP channel attribute.
-
Syntax
MI_S32 MI_DIVP_SetChnAttr( MI_DIVP_CHN DivpChn, MI_DIVP_ChnAttr_t* pstAttr);
-
Parameter
Parameter Name Description Input/Output DivpChn DIVP channel ID. Input pstAttr Pointer to the set DVIP channel attribute structure. Input -
Return Value
-
MI_SUCCESS: DIVP channel attribute set successfully
-
MI_DIVP_ERR_FAILED: Attempt to set DIVP channel attribute failed
-
MI_ERR_INVALID_PARAMETER: Invalid parameter used. Please refer to MI_DIVP_ChnAttr_t
-
-
Requirement
-
Header: mi_divp.h, mi_divp_datatype.h
-
Library: libmi_divp.so
-
-
Note
The maximum width and the maximum height of input image in channel attribute structure member are static attributes which cannot be modified once the channel is created.
-
Related API
2.4. MI_DIVP_GetChnAttr¶
-
Function
Get the DIVP channel attribute.
-
Syntax
MI_S32 MI_DIVP_GetChnAttr( MI_DIVP_CHN DivpChn, MI_DIVP_ChnAttr_t* pstAttr);
-
Parameter
Parameter Name Description Input/Output DivpChn DIVP channel ID. Input pstAttr Pointer to the returned DVIP channel attribute structure. Output -
Return Value
-
MI_SUCCESS: DIVP channel attribute gotten successfully
-
MI_DIVP_ERR_FAILED: Attempt to get DIVP channel attribute failed
-
-
Requirement
-
Header: mi_divp.h, mi_divp_datatype.h
-
Library: libmi_divp.so
-
-
Note
Initial value will be returned with the first successful attempt to get the DIVP channel attribute.
-
Related API
2.5. MI_DIVP_StartChn¶
-
Function
Start a channel.
-
Syntax
MI_S32 MI_DIVP_StartChn(MI_DIVP_CHN DivpChn);
-
Parameter
Parameter Name Description Input/Output DivpChn DIVP channel ID. Input -
Return Value
-
MI_SUCCESS: DIVP channel started successfully
-
MI_DIVP_ERR_FAILED: Attempt to start DIVP channel failed
-
-
Requirement
-
Header: mi_divp.h, mi_divp_datatype.h
-
Library: libmi_divp.so
-
-
Note
Channels to be started must be created beforehand and not destroyed.
-
Related API
2.6. MI_DIVP_StopChn¶
-
Function
Stop a channel.
-
Syntax
MI_S32 MI_DIVP_StopChn(MI_DIVP_CHN DivpChn);
-
Parameter
Parameter Name Description Input/Output DivpChn DIVP channel ID. Input -
Return Value
-
MI_SUCCESS: DIVP channel stopped successfully
-
MI_DIVP_ERR_FAILED: Attempt to stop DIVP channel failed
-
-
Requirement
-
Header: mi_divp.h, mi_divp_datatype.h
-
Library: libmi_divp.so
-
-
Note
Repeated execution of this stop function will return MI_SUCCESS.
-
Related API
2.7. MI_DIVP_SetOutputPortAttr¶
-
Function
Set the DIVP channel output port attribute.
-
Syntax
MI_S32 MI_DIVP_SetOutputPortAttr ( MI_DIVP_CHN DivpChn, MI_DIVP_OutputPortAttr_t * pstOutputPortAttr);
-
Parameter
| Parameter Name | Description | Input/Output |
|---|---|---|
| DivpChn | DIVP channel ID. | Input |
| pstOutputPortAttr | Output port attribute pointer. | Input |
-
Return Value
-
MI_SUCCESS: DIVP channel output port attribute set successfully
-
MI_DIVP_ERR_FAILED: Attempt to set DIVP channel output port attribute failed
-
-
Requirement
-
Header: mi_divp.h, mi_divp_datatype.h
-
Library: libmi_divp.so
-
-
Related API
2.8. MI_DIVP_GetOutputPortAttr¶
-
Function
Get the DIVP output port attribute.
-
Syntax
MI_S32 MI_DIVP_GetOutputPortAttr( MI_DIVP_CHN DivpChn, MI_DIVP_OutputPortAttr_t * pstOutputPortAttr);
-
Parameter
Parameter Name Description Input/Output DivpChn DIVP channel ID. Input pstOutputPortAttr Output port attribute pointer. Output -
Return Value
-
MI_SUCCESS: DIVP channel output port attribute gotten successfully
-
MI_DIVP_ERR_FAILED: Attempt to get DIVP channel output port attribute failed
-
-
Requirement
-
Header: mi_divp.h, mi_divp_datatype.h
-
Library: libmi_divp.so
-
-
Related API
2.9. MI_DIVP_RefreshChn¶
-
Function
Refresh a DIVP channel in pause state.
-
Syntax
MI_S32 MI_DIVP_RefreshChn ( MI_DIVP_CHN DivpChn);
-
Parameter
Parameter Name Description Input/Output DivpChn ID of refreshed channel. Input -
Return Value
-
MI_SUCCESS: DIVP channel refreshed successfully.
-
MI_DIVP_ERR_NO_CONTENT: No content in the channel being refreshed.
-
-
Requirement
-
Header: mi_divp.h, mi_divp_datatype.h
-
Library: libmi_divp.so
-
-
Note
This interface is used for refreshing a channel under pause state.
-
Example
In the scenario where DIVP is bound to VDEC, this interface is called. DIVP can retain the last frame of the picture after VDEC stops streaming, and repeat the processing and then send it to the back end. DIVP will not process the new picture until VDEC restarts streaming.
2.10. MI_DIVP_StretchBuf¶
-
Function
Stretch or crop image in specified memory to target memory.
-
Syntax
MI_S32 MI_DIVP_StretchBuf(MI_DIVP_DirectBuf_t *pstSrcBuf, MI_SYS_WindowRect_t *pstSrcCrop, MI_DIVP_DirectBuf_t *pstDstBuf);
-
Parameter
Parameter Name Description Input/Output pstSrcBuf Information pointer of specified buff used to store source image. Cannot be NULL. Input pstSrcCrop Pointer to image crop attribute, If you don't need to crop the image, pass NULL. Input pstDstBuf Information pointer of target buff used to store processed image. Cannot be NULL. Input -
Return Value
-
MI_SUCCESS: Image stretched successfully.
-
MI_DIVP_ERR_FAILED: Image stretching failed.
-
-
Requirement
-
Header: mi_divp.h, mi_divp_datatype.h
-
Library: libmi_divp.so
-
-
Note
Supports only YUV420SP or ARGB8888 image pixel format
-
Example
#define SRC_WIDTH 1280 #define SRC_HEIGHT 720 #define SRC_BUFF_STRIDE (ALIGN_UP(SRC_WIDTH,16)) #define SRC_BUFF_SIZE (SRC_BUFF_STRIDE*SRC_HEIGHT*3/2) #define DST_WIDTH 640 #define DST_HEIGHT 480 #define DST_BUFF_STRIDE (ALIGN_UP(DST_WIDTH,16)) #define DST_BUFF_SIZE (DST_BUFF_STRIDE*DST_HEIGHT*3/2) #define CROP_X 200 #define CROP_Y 100 #define CROP_W 68 #define CROP_H 48 int main(void) { MI_PHY phySrcBufAddr = 0; MI_PHY phyDstBufAddr = 0; MI_DIVP_DirectBuf_t stSrcBuf; MI_DIVP_DirectBuf_t stDstBuf; MI_SYS_WindowRect_t stSrcCrop; MI_SYS_MMA_Alloc(NULL, SRC_BUFF_SIZE, &phySrcBufAddr); MI_SYS_MMA_Alloc(NULL, DST_BUFF_SIZE, &phyDstBufAddr); stSrcBuf.ePixelFormat = E_MI_SYS_PIXEL_FRAME_YUV_SEMIPLANAR_420; stSrcBuf.u32Width = SRC_WIDTH; stSrcBuf.u32Height = SRC_HEIGHT; stSrcBuf.u32Stride[0] = SRC_BUFF_STRIDE; stSrcBuf.u32Stride[1] = SRC_BUFF_STRIDE; stSrcBuf.phyAddr[0] = phySrcBufAddr; stSrcBuf.phyAddr[1] = stSrcBuf.phyAddr[0] + SRC_BUFF_STRIDE*SRC_HEIGHT; stDstBuf.ePixelFormat = E_MI_SYS_PIXEL_FRAME_YUV_SEMIPLANAR_420; stDstBuf.u32Width = DST_WIDTH; stDstBuf.u32Height = DST_HEIGHT; stDstBuf.u32Stride[0] = DST_BUFF_STRIDE; stDstBuf.u32Stride[1] = DST_BUFF_STRIDE; stDstBuf.phyAddr[0] = phyDstBufAddr; stDstBuf.phyAddr[1] = stDstBuf.phyAddr[0] + DST_BUFF_STRIDE*DST_HEIGHT; stSrcCrop.u16X = CROP_X; stSrcCrop.u16Y = CROP_Y; stSrcCrop.u16Width = CROP_W; stSrcCrop.u16Height = CROP_H; if(FillSrcBuf("./1280x720_yuv420.yuv", &stSrcBuf)) return NULL; if(MI_SUCCESS == MI_DIVP_StretchBuf(&stSrcBuf, &stSrcCrop, &stDstBuf)) { if(DumpDstBuf(&stDstBuf)) return NULL; } MI_SYS_MMA_Free(phySrcBufAddr); MI_SYS_MMA_Free(phyDstBufAddr); } //fill src buff with yuv420/argb8888 image data static int FillSrcBuf(const char* FilePath,MI_DIVP_DirectBuf_t *pstDirectSrcBuf) { int ret = 0; FILE *fp; void *pVirSrcBufAddr = NULL; int LineIdx = 0; int ReadSize = 0; fp = fopen(FilePath,"r"); if(!fp) { divp_ut_dbg("open file[%s] failed\n",FilePath); ret = -1; goto EXIT; } MI_SYS_Mmap(pstDirectSrcBuf->phyAddr[0], SRC_BUFF_SIZE, &pVirSrcBufAddr, FALSE); if(!pVirSrcBufAddr) { divp_ut_dbg("mmap dst buff failed\n"); ret = -1; goto EXIT; } for(LineIdx = 0; LineIdx < SRC_HEIGHT*3/2; LineIdx++) { ReadSize += fread(pVirSrcBufAddr+LineIdx*SRC_BUFF_STRIDE, 1, SRC_WIDTH, fp); } if(ReadSize < SRC_WIDTH*SRC_HEIGHT*3/2) { fseek(fp, 0, SEEK_SET); ReadSize = 0; for(LineIdx = 0; LineIdx < SRC_HEIGHT*3/2; LineIdx++) { ReadSize += fread(pVirSrcBufAddr+LineIdx*SRC_BUFF_STRIDE, 1, SRC_WIDTH, fp); } if(ReadSize < SRC_WIDTH*SRC_HEIGHT*3/2) { divp_ut_dbg("read file failed, read size:%d\n",ReadSize); ret = -1; goto EXIT; } } EXIT: if(fp) fclose(fp); if(pVirSrcBufAddr) MI_SYS_Munmap(pVirSrcBufAddr, SRC_BUFF_SIZE); return ret; } //image processing result is stored in dst buff static int DumpDstBuf(MI_DIVP_DirectBuf_t *pstDirectDstBuf) { int ret = 0; FILE *fp; void *pVirDstBufAddr = NULL; int LineIdx = 0; int WriteSize = 0; char outputfile[128]; struct timeval timestamp; gettimeofday(×tamp, 0); sprintf(outputfile, "output_%dx%d_%d_%08d.yuv",pstDirectDstBuf->u32Width,pstDirectDstBuf->u32Height,(int)timestamp.tv_sec,(int)timestamp.tv_usec); fp = fopen(outputfile,"w+"); if(!fp) { divp_ut_dbg("open file[%s] failed\n",outputfile); ret = -1; goto EXIT; } MI_SYS_Mmap(pstDirectDstBuf->phyAddr[0], DST_BUFF_SIZE, &pVirDstBufAddr, FALSE); if(!pVirDstBufAddr) { divp_ut_dbg("mmap dst buff failed\n"); ret = -1; goto EXIT; } for(LineIdx = 0; LineIdx < DST_HEIGHT*3/2; LineIdx++) { WriteSize += fwrite(pVirDstBufAddr+LineIdx*DST_BUFF_STRIDE, 1, DST_WIDTH, fp); } if(WriteSize < DST_WIDTH*DST_HEIGHT*3/2) { divp_ut_dbg("write file failed, write size:%d\n",WriteSize); } fflush(fp); sync(); divp_ut_dbg("save stretch dst buff to[%s]\n",outputfile); EXIT: if(fp) fclose(fp); if(pVirDstBufAddr) MI_SYS_Munmap(pVirDstBufAddr, DST_BUFF_SIZE); return 0; }
2.11. MI_DIVP_InitDev¶
-
Function
Initialize DIVP device.
-
Syntax
MI_S32 MI_DIVP_InitDev(*MI_DIVP_InitParam_t* *pstInitParam);
-
Parameters
Parameter Name Description Input/Output pstInitParam Initialization Parameter Input -
Return Value
-
Zero: Successful
-
Non-zero: Failed, see error code details
-
-
Requirement
-
Header: mi_divp.h, mi_divp_datatype.h
-
Library: libmi_divp.so
-
2.12. MI_DIVP_DeInitDev¶
-
Function
De-initialize DIVP device.
-
Syntax
MI_S32 MI_DIVP_DeInitDev(void);
-
Return Value
-
Zero: Successful
-
Non-zero: Failed, see error code details
-
-
Requirement
-
Header: mi_divp.h, mi_divp_datatype.h
-
Library: libmi_divp.so
-
-
Note
-
This interface should be called after the device has been initialized; otherwise, a failed message will be returned.
-
If this interface is not called after the app exited, the DIVP device will be auto de-initialized.
-
2.13. MI_DIVP_StretchBufEx¶
-
Description
Scale, stretch, crop the image data in the specified memory area, and output to the target memory.
-
Syntax
MI_S32 MI_DIVP_StretchBufEx(MI_DIVP_DirectBuf_t *pstSrcBuf, MI_SYS_WindowRect_t *pstSrcCrop, MI_DIVP_DirectBuf_t *pstDstBuf, MI_DIVP_FilterType_e eFilterType);
-
Parameter
Parameter Name Description Input/Output pstSrcBuf Source buffer information pointer Input pstSrcCrop Crop information pointer Input pstDstBuf Target buffer information pointer Input eFilterType Scaling`s filter type Input -
Return Value
-
MI_OK: Successful
-
Non-MI_OK: Failed, see error code details
-
-
Requirement
Header: mi_divp.h、mi_divp_datatype.h
Library: libmi_divp.so
3. DIVP DATA TYPE¶
The table below lists the data structure definitions of the related DIVP data types:
| DATA TYPE | Description |
|---|---|
| MI_DIVP_DiType_e | Defines DIVP deinterlace type. |
| MI_DIVP_TnrLevel_e | Defines DIVP TNR level. |
| MI_DIVP_FilterType_e | Define DIVP scaling filter type |
| MI_DIVP_OutputPortAttr_t | Defines DIVP output port attribute parameter. |
| MI_DIVP_ChnAttr_t | Defines DIVP channel attribute parameter. |
| MI_DIVP_DirectBuf_t | Memory information for stretching image |
| MI_DIVP_InitParam_t | Define the initialized parameter of DIVP device |
NOTE: This section covers only the most important data structures. For data types not listed here, please refer to mi_divp_datatype.h.
3.1. MI_DIVP_DiType_e¶
-
Description
Defines DIVP deinterlace type.
-
Definition
typedef enum { E_MI_DIVP_DITYPE_OFF, //off E_MI_DIVP_DITYPE_2D, ///2.5D DI E_MI_DIVP_DITYPE_3D, ///3D DI E_MI_DIVP_DITYPE_NUM, } MI_DIVP_DiType_e; -
Member
Member Description E_MI_DIVP_DITYPE_OFF Disable deinterlace function on DIVP channel. E_MI_DIVP_DITYPE_2D Enable 2.5D deinterlace function on DIVP channel. E_MI_DIVP_DITYPE_3D Enable 3D deinterlace function on DIVP channel. E_MI_DIVP_DITYPE_NUM Number of deinterlace types on DIVP channel. -
Note
-
TNR must be turned on when DI is enabled. MSR930 supports 3D DI only, and the TNR level must be set as E_MI_DIVP_TNRLEVEL_MIDDLE.
-
3D DI conflicts with rotation; the two functions cannot be used at the same time.
-
Note that the following chips do not support the DI function:
Pretzel
Macaron
Taiyaki/Takoyaki
Pudding
Ispahan
Ikayaki
-
3.2. MI_DIVP_TnrLevel_e¶
-
Description
Defines DIVP TNR level.
-
Definition
typedef enum { E_MI_DIVP_TNRLEVEL_OFF, E_MI_DIVP_TNRLEVEL_LOW, E_MI_DIVP_TNRLEVEL_MIDDLE, E_MI_DIVP_TNRLEVEL_HIGH, E_MI_DIVP_TNRLEVEL_NUM, } MI_DIVP_TnrLevel_e; -
Member
Member Description E_MI_DIVP_TNRLEVEL_OFF Disable TNR on DIVP channel. E_MI_DIVP_TNRLEVEL_LOW Apply low level TNR on DIVP channel. E_MI_DIVP_TNRLEVEL_MIDDLE Apply middle level TNR on DIVP channel. E_MI_DIVP_TNRLEVEL_HIGH Apply high level TNR on DIVP channel. E_MI_DIVP_TNRLEVEL_NUM Number of TNR levels on DIVP channel. -
Note
-
MSR930 supports TNR, but the TNR level cannot be modified.
-
Note that the following chips do not support the TNR function:
Pretzel
Macaron
Taiyaki/Takoyaki
Pudding
Ispahan
Ikayaki
-
3.3. MI_DIVP_FilterType_e¶
-
Description
Define DIVP scaling filter type .
-
Definition
typedef enum { E_MI_DIVP_FILTER_TYPE_AUTO, E_MI_DIVP_FILTER_TYPE_BYPASS, E_MI_DIVP_FILTER_TYPE_BILINEAR, E_MI_DIVP_FILTER_TYPE_FILTER, } MI_DIVP_FilterType_e; -
Member
Member Description E_MI_DIVP_FILTER_TYPE_AUTO Auto mode Automatically select bypass or bilinear. E_MI_DIVP_FILTER_TYPE_BYPASS Bypass mode E_MI_DIVP_FILTER_TYPE_BILINEAR Bilinear mode E_MI_DIVP_FILTER_TYPE_FILTER Filter type number -
Note
-
No scaling.
-
The default is E_MI_DIVP_FILTER_TYPE_BYPASS filter type.
-
-
Related Data Type and Interface
3.4. MI_DIVP_OutputPortAttr_t¶
-
Description
Defines DIVP output port attribute parameter.
-
Definition
typedef struct MI_DIVP_OutputPortAttr_s { MI_U32 u32Width;//output width MI_U32 u32Height;//output height MI_SYS_PixelFormat_e ePixelFormat; MI_SYS_CompressMode_e eCompMode;//compress mode }MI_DIVP_OutputPortAttr_t; -
Member
Member Description u32Width DIVP channel output screen width. u32Height DIVP channel output screen height. ePixelFormat DIVP channel output screen pixel format. eCompMode DIVP channel output image compression mode. DIVP channel can only output images not in compressed format. -
Note
The following table lists the different output attributes of each chip:
Output Attr/Chip Series Output Pixel Format Output Stride Alignment Output Width Alignment Output Height Alignment Output Min Size Output Max Size MSR930 YUV422 32 2 2 128x64 4096x4096 YUV420(NV12) ARGB8888 ABGR8888 ARGB1555 MST420 Pretzel YUV422 32 2 2 64x4 3840x3840 YUV420(NV12) 16 ARGB8888/ABGR8888 64 RGB565 32 Macaron YUV422 32 2 2 64x4 2688x2688 YUV420(NV12) 16 ARGB8888/ABGR8888 64 RGB565 32 Taiyaki/Takoyaki YUV422 32 2 2 64x4 1920x1920 YUV420(NV12) 16 ARGB8888/ABGR8888 64 RGB565 32 Pudding YUV422 32 2 2 Rotate: 16x2
No rotate: 32x43840x3840 YUV420(NV12) 16 ARGB8888/ABGR8888 64 RGB565 32 Ispahan YUV422 32 2 2 64x4 2688x2688 YUV420(NV12) 16 ARGB8888/ABGR8888 64 RGB565 32 Ikayaki YUV422 32 2 2 Rotate:16x16
No rotate:16x21920x1920 YUV420(NV12) 16 ARGB8888/ABGR8888 64 RGB565 32
3.5. MI_DIVP_ChnAttr_t¶
-
Description
Defines DIVP channel attribute parameter.
-
Definition
typedef struct MI_DIVP_ChnAttr_s { MI_U32 u32MaxWidth;//support max input width MI_U32 u32MaxHeight;//support max input height MI_DIVP_TnrLevel_e eTnrLevel;//TNR level MI_DIVP_DiType_e eDiType;//DI type MI_SYS_Rotate_e eRotateType;//rotate angle MI_SYS_WindowRect_t stCropRect;//crop information MI_BOOL bHorMirror;//horizontal mirror MI_BOOL bVerMirror;//vertical mirror }MI_DIVP_ChnAttr_t; -
Member
Member Description u32MaxWidth Maximum input width on DIVP channel. u32MaxHeight Maximum input height on DIVP channel. eTnrLevel TNR level on DIVP channel. eDiType Deinterlace type on DIVP channel. eRotateType Angle of screen rotation on DIVP channel. stCropRect Crop information on DIVP channel. bHorMirror Horizontal mirroring on DIVP channel. bVerMirror Vertical mirroring on DIVP channel. -
Note
Input Attr/Chip Series Input Pixel Format Input Stride Alignment Input Width Alignment Input Height Alignment Input Min Size Input Max Size MSR930 YUV422/YUV420(NV12)/ ARGB8888/ ABGR8888/ARGB1555/Tile Mode 32 YUV422:16
NV12:322 128x64 4096x4096 Pretzel YUV422 32 2 2 64x4 3840x3840 YUV420(NV12) 16 ARGB8888/ABGR8888 64 RGB565 32 Macaron YUV422 32 2 2 64x4 2688x2688 YUV420(NV12) 16 ARGB8888/ABGR8888 64 RGB565 32 Taiyaki/Takoyaki YUV422 32 2 2 64x4 1920x1920 YUV420(NV12) 16 ARGB8888/ABGR8888 64 RGB565 32 Pudding YUV422 32 2 2 Rotate: 128x128
No rotate: 32x43840x3840 YUV420(NV12) 16 ARGB8888/ABGR8888 64 RGB565 32 Ispahan YUV422 32 2 2 64x4 2688x2688 YUV420(NV12) 16 ARGB8888/ABGR8888 64 RGB565 32 Ikayaki YUV422 32 16 2 Rotate:16x16
No rotate:16x21920x1920 YUV420(NV12) 16 16 2 ARGB8888/ABGR8888 64 16 2
3.6. MI_DIVP_DirectBuf_t¶
-
Description
Memory information for stretching image.
-
Definition
typedef struct MI_DIVP_DirectBuf_s { MI_SYS_PixelFormat_e ePixelFormat; //YUV420SP or ARGB888 only MI_U32 u32Width; MI_U32 u32Height; MI_U32 u32Stride[3]; MI_PHY phyAddr[3]; }MI_DIVP_DirectBuf_t; -
Member
Member Description ePixelFormat Pixel format of image u32Width Width of image u32Height Height of image u32Stride Number of bytes per line of an image phyAddr Start physical address of buffer -
Note
The pixel format of image will only be YUV420SP or ARGB8888.
The stride cannot be less than 64.
-
Related Data Type and Interface
3.7. MI_DIVP_InitParam_t¶
-
Description
DIVP device initialization parameter.
-
Definition
typedef struct MI_DIVP_InitParam_s { MI_U32 u32DevId; MI_U8 *u8Data; } MI_DIVP_InitParam_t; -
Member
Member Description u32DevId Device ID u8Data Data pointer buffer -
Related Data Type and Interface
4. DIVP ERROR CODES¶
The following table lists the DIVP API Error Codes.
| Error Code | Macro Definition | Description |
|---|---|---|
| 0x0 | MI_SUCCESS | Successful. |
| 0xa00c2002 | MI_DIVP_ERR_INVALID_CHNID | Invalid channel ID. |
| 0xa00c2003 | MI_DIVP_ERR_INVALID_PARAM | Invalid parameter. |
| 0xa00c2006 | MI_DIVP_ERR_NULL_PTR | Null pointer. |
| 0xa00c201c | MI_DIVP_ERR_FAILED | DIVP operation failed |
| 0xa00c2005 | MI_DIVP_ERR_NO_RESOUCE | No resource available. |
| 0xa00c201c | MI_DIVP_ERR_NO_CONTENT | No content in channel. |
5. PROCFS INTRODUCTION¶
5.1. cat¶
-
Debug info
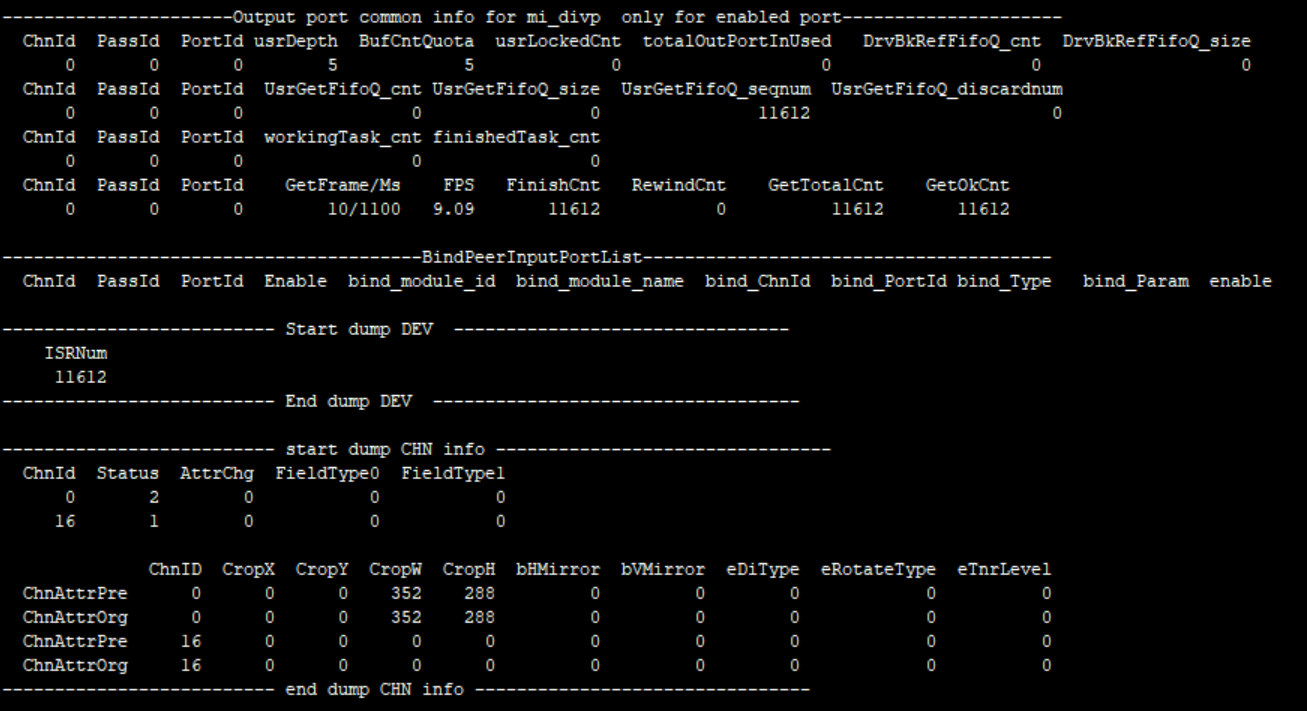
# cat /proc/mi_modules/mi_divp/mi_divp0


-
Debug info analysis
Record the current usage status of a DIVP device, as well as device attributes, layer attributes, and inputport/outputport attributes, which can be dynamically obtained for debugging and testing.
-
Parameter Description
Parameter Description channelinfo ChnId 0~16
16 Capture Channel is not open to the upper layerStatus 0: INITED
1: CREATED
2: STARTED
3: STOPED
4: DISTROYEDAttrChg 0:not change
1:changedFieldType0,
FieldType1
(last two fields's type)0: NONE //no field.
1: TOP //Top field only.
2: BOTTOM //Bottom field only.
3: BOTH //Both fields.
4: NUMChnAttrPre Last setting attributes of channel ChnAttrOrg Original setting attributes of channel CropX,CropY,
CropW,CropHThe crop location set by the upper layer bHMirror
bVMirrorHorizontal mirror enable
Vertical mirror enable
0:disable
1:enableeDiType 0: OFF,//off
1: 2D,///2.5D DI
2: 3D,///3D DI
3: NUMeRotateType 0: NONE, //Rotate 0 degrees
1: 90, //Rotate 90 degrees
2: 180, //Rotate 180 degrees
3: 270, //Rotate 270 degrees
4: NUMeTnrLevel 0: OFF,
1: LOW,
2: MIDDLE,
3: HIGH,
4: NUMinputport info ChnId Channel ID 0~16 InputChg Whether the input port attribute has changed bIPChg 0: No change between interlaced and progressive
1: Interlace switch to progressive, or progressive to interlacePreWidth input port width PreHeight input port height Pixel E_MI_SYS_PIXEL_FRAME_YUV422_YUYV = 0, E_MI_SYS_PIXEL_FRAME_ARGB8888, E_MI_SYS_PIXEL_FRAME_ABGR8888, E_MI_SYS_PIXEL_FRAME_RGB565, E_MI_SYS_PIXEL_FRAME_ARGB1555, E_MI_SYS_PIXEL_FRAME_I2, E_MI_SYS_PIXEL_FRAME_I4, E_MI_SYS_PIXEL_FRAME_I8, E_MI_SYS_PIXEL_FRAME_YUV_SEMIPLANAR_422, E_MI_SYS_PIXEL_FRAME_YUV_SEMIPLANAR_420, E_MI_SYS_PIXEL_FRAME_YUV_MST_420,
//vdec mstar private video format E_MI_SYS_PIXEL_FRAME_YC420_MSTTILE1_H264, E_MI_SYS_PIXEL_FRAME_YC420_MSTTILE2_H265, E_MI_SYS_PIXEL_FRAME_YC420_MSTTILE3_H265, E_MI_SYS_PIXEL_FRAME_FORMAT_MAXStride Input stride 2Pmode b2P_Enable value, 1 means enable, 0 means disable EnqueueTask Enqueue task number GetInTaskCnt OnPreProcessInputTask task number Outputport Info ChnId Channel ID 0~16 OutputChg Whether the Output property has changed
0: not change
1: changedPixel The same as input pixel CompMode 0 //no compress
1 //compress unit is 256 bytes as a segment
2 //compress unit is the whole line
3 //compress unit is the whole frame
4 //numberPreWidth PreHeight The width and height of the output port set last time Stride Output stride phyaddr The physical address of the output buffer FinishTaskCnt Finish task count fps Output port frame rate Common Info ChnNum Total number of Channel Pixel The same as input pixel PassNum Total number of Pass InPortNum Total number of Input port OutPortNum Total number of Output port CollectSize Attach pstAllocator size current_buf_size The currently requested memory size Peak_buf_size Peak memory usage user_pid Process id user_buf_quota The maximum number of buffers that the user can take UsrInjectQ_cnt User inject buffer count BindInQ_cnt The number of buffers that the front end gives to the input port enqueue TotalPendingBuf_size The total buffer size of each task in the current input working queue usrLockedInjectCnt The number of buffers the user gets newPulseQ_cnt Buffer count of new_pulse_fifo_inputqueque nextTodoPulseQ_cnt Buffer count of next_todo_pulse_inputqueue curWorkingQ_cnt Buffer count of cur_working_input_queue workingTask_cnt Task count of input_working_tasklist lazzyRewindTask_cnt Task count that need to retry bind_module_id Binding module id bind_module_name Binding module name bind_ChnId Binding module channel id bind_PortId Binding module port id bind_Type Binding type:
E_MI_SYS_BIND_TYPE_FRAME_BASE = 0x00000001,
E_MI_SYS_BIND_TYPE_SW_LOW_LATENCY = 0x00000002,
E_MI_SYS_BIND_TYPE_REALTIME = 0x00000004,
E_MI_SYS_BIND_TYPE_HW_AUTOSYNC = 0x00000008,
E_MI_SYS_BIND_TYPE_HW_RING = 0x00000010bind_Param Binding parameter SrcFrmrate Source frame rate DstFrmrate Destination frame rate GetFrame/Ms Actual frames/time used FPS Actual frame rate RewindCnt The number of tasks that need to be retryed usrDepth The maximum number of output port buffer user can get BufCntQuota The maximum number of buffers output can apply for usrLockedCnt The number of buffers user actually get totalOutPortInUsed The number of buffers output actually apply for DrvBkRefFifoQ_cnt For special driver which need to refer back pre-processed buffer DrvBkRefFifoQ_size The total buffer size occupied by stDrvBkRefFifoQueue UsrGetFifoQ_cnt Number of buffers from Duplicate to output port UsrGetFifoQ_size The total size of the buffer from Duplicate to the output port UsrGetFifoQ_seqnum The total number of buffers the output gets UsrGetFifoQ_discardnum The number of original buffers abandoned due to new buffer requirements from Output finishedTask_cnt Number of Output finish tasks GetTotalCnt The total number of buffers output gets GetOkCnt Count the number of frames whose index is E_MI_SYS_FRC_OBTAIN ISRNum Total number of interruptions received
5.2. echo¶
| Function | Print the PTS of each frame received. If the front end is VDEC, it will print the FrameID sent by VDEC to debug the frame loss problem. Normally, the values of FrameID and PTS are increased. |
|---|---|
| Command | echo checkframeid [ChnID] [Status] > /proc/mi_modules/mi_divp/mi_divp0 |
| Parameter Description | [ChnID] Channel ID [0~32] [Status] ON: Start printing; OFF: Stop printing |
| Example | echo checkframeid 0 ON/OFF > /proc/mi_modules/mi_divp/mi_divp0 [MI DIVP PROCFS]:ChnID 0, receive buffer ID = 63 , H = 0, L = 196615, PTS = 43956000 [MI DIVP PROCFS]:ChnID 0, receive buffer ID = 64 , H = 0, L = 196616, PTS = 43989000 [MI DIVP PROCFS]:ChnID 0, receive buffer ID = 65 , H = 0, L = 196615, PTS = 44022000 [MI DIVP PROCFS]:ChnID 0, receive buffer ID = 66 , H = 0, L = 196615, PTS = 44055000 [MI DIVP PROCFS]:ChnID 0, receive buffer ID = 67 , H = 0, L = 196615, PTS = 44088000 [MI DIVP PROCFS]:ChnID 0, receive buffer ID = 68 , H = 0, L = 196615, PTS = 44121000 [MI DIVP PROCFS]:ChnID 0, receive buffer ID = 69 , H = 0, L = 196614, PTS = 44154000 [MI DIVP PROCFS]:ChnID 0, receive buffer ID = 70 , H = 0, L = 196615, PTS = 44187000 receive buffer ID: Buffer ID received by each channel. H/L: FrameID sent by VDEC. H high 32 bits, L low 32 bits, if the front end is not VDEC, there is no such printing. PTS: FrameBuffer PTS. |
| Function | Count the number of GetBuffers in 1 second, and the average, maximum, and minimum of the interval between two inputbuffers, and debug frame loss problems. |
|---|---|
| Command | echo statintervaltime [ChnID] ON/OFF > /proc/mi_modules/mi_divp/mi_divp0 |
| Parameter Description | [ChnID] Channel ID [0~32] [Status] ON: Start counting and printing; OFF: Stop counting and printing |
| Example | echo statintervaltime 0 ON > /proc/mi_modules/mi_divp/mi_divp0 [MI DIVP PROCFS]:ChnlID 0,1s FrameCnt:19,Average time: 50393 us,MAX 59601 us,57652 us,57534 us,MIN 41401 us,42415 us,42896 us [MI DIVP PROCFS]:ChnlID 0,1s FrameCnt:19,Average time: 50247 us,MAX 63004 us,62889 us,62845 us,MIN 36896 us,37120 us,37130 us [MI DIVP PROCFS]:ChnlID 0,1s FrameCnt:18,Average time: 51049 us,MAX 70431 us,59763 us,59736 us,MIN 38873 us,40109 us,40283 us [MI DIVP PROCFS]:ChnlID 0,1s FrameCnt:20,Average time: 48537 us,MAX 67168 us,67117 us,66953 us,MIN 18513 us,31242 us,32681 us [MI DIVP PROCFS]:ChnlID 0,1s FrameCnt:19,Average time: 49962 us,MAX 61416 us,61416 us,61338 us,MIN 38564 us,38736 us,38762 us FrameCnt: Number of GetBuffer in 1 second Average time: The average time between two buffers MAX: The three largest values of the interval MIN: The three smallest values of the interval |
| Function | DIVP no longer processes a certain channel to save bandwidth and verify bandwidth related issues. |
|---|---|
| Command | echo stoponechannel [ChnID] [Status] > /proc/mi_modules/mi_divp/mi_divp0 |
| Parameter Description | [ChnID] Channel ID [0~32] [Status] ON: Stop processing the set channel; OFF: Continue to process the set channel |
| Example | echo stoponechannel 0 ON > /proc/mi_modules/mi_divp/mi_divp0 The screen of channel 0 will freeze |
| Function | Dump an input frame. |
|---|---|
| Command | echo dumpframe [ChnID] [frameStorePath] > /proc/mi_modules/mi_divp/mi_divp0 |
| Parameter Description | [ChnID] Channel ID [0~16] [frameStorePath] Specify the location to save the input frame. |
| Example | #echo dumpframe 0 /customer > /proc/mi_modules/mi_divp/mi_divp0 Dump an input frame and save it under /customer. The default input frame name such as: dump_divp_chn0_frame_w_352_h_288.yuv |
| Function | Open the debug information of mi divp. |
|---|---|
| Command | echo debug 0/1 > /proc/mi_modules/mi_divp/mi_divp0 |
| Parameter Description | [0/1] 0 means off, 1 means on. |
| Example | #echo debug 1 > /proc/mi_modules/mi_divp/mi_divp0 printk in _MI_SYS_IMPL_Common_WriteProc divp debug:on #echo debug 0 > /proc/mi_modules/mi_divp/mi_divp0 printk in _MI_SYS_IMPL_Common_WriteProc divp debug:off |