RISCV_ADCLP使用参考
REVISION HISTORY¶
| Revision No. | Description |
Date |
|---|---|---|
| 1.0 | 09/06/2024 | |
| 1.1 | 04/14/2025 | |
| 1.2 | 06/13/2025 |
1. 概述¶
逐次逼近型模数转换器(Successive Approximation ADC)采用的是一种反馈比较型电路结构。实现方式简要概述为:取一个数字量加到DAC上,可得到一个对应的输出模拟电压,将这个模拟电压和输入的模拟电压信号相比较,如果两者不相等,则调整所取的数字量,直到两个模拟电压相等为止,最后所取的这个数字量就是所求的转换结果。
2. 关键字说明¶
-
ADCLP
Analog-to-digital converter Low Precision,低精度(10bit)模数转换器
-
ADCMP
Analog-to-digital converter Medium Precision,中精度(12bit)模数转换器
-
upper/lower bound
ADCLP可设置外部输入电压数字量的上下限,超出范围则触发中断
-
基准电压
用于模数转换计算时使用的参考电压,也是最大量程,若基准电压设定为1.8v,当外部输入电压>=1.8v时,数字量达到最大值1023
3. 功能描述¶
3.1. 硬件功能说明¶
-
SAR ADCLP共计5个Channel可支持外部输入电压的模数转换
-
采样精度为10bit,因此获取到的寄存器数值范围在0~0x3ff之间
-
支持两个档位的基准电压(即满量程)切换,分别为1.8V和1.0V
-
采样频率 = 12Mhz / 104 = 115384hz(相当于硬件上每点的采样间隔为8667ns)
-
通道模式可选择1 channel / 4 channel / 8 channel / 9 channel,不同模式决定了数据更新的时间间隔,如果选用1 channel模式,说明硬件只启用了1个通道,ADC数据更新的时间间隔为8667ns,如果选用4 channel模式,ADC数据更新的时间间隔为(8667ns * 4)
-
支持外部输入电压的阈值设定,当电压超出阈值范围后,会触发中断,硬件中断的响应时间(不包含软件处理时间)会受到ADC数据更新的时间间隔影响,如果选用1 channel模式,硬件中断的响应时间至少大于8667ns,如果选用4 channel模式,硬件中断的响应时间至少大于(8667ns * 4)
3.2. 计算说明¶
SAR ADCLP的主要功能是将模拟信号转换为相应的数字信号,即可以将输入电压转换为数字量存储于寄存器中,通过公式计算出输入电压,
计算公式:电压 = ( 寄存器数值 / 满量程 )* 基准电压
即如果读到的数值是0x1D2,可得电压为0x1D2/0x3FF *1.8=0.82v左右
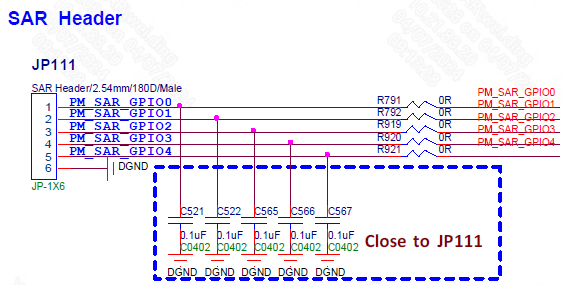
4. 硬件连接介绍¶
如下图,可将外部电压接入引脚PM_SAR_GPIO0~PM_SAR_GPIO4
5. RTOS用法介绍¶
5.1. DRIVER PATH¶
sc/driver/sysdriver/saradc/os/adclp_os.h sc/driver/sysdriver/saradc/drv/pub/drv_adclp.h sc/driver/sysdriver/saradc/drv/src/drv_adclp.c sc/driver/sysdriver/saradc/drv/src/drv_adclp_test.c sc/driver/sysdriver/saradc/hal/chipname/src/hal_adclp.c sc/driver/sysdriver/saradc/hal/chipname/inc/hal_adclp.h sc/driver/sysdriver/saradc/hal/chipname/inc/hal_adclp_cfg.h
5.2. CONFIG配置¶
config文件位于mak/options_chipname_riscv_isw.mak,使能CONFIG_SARADC_SUPPORT
# Feature_Name = [DRV] SARADC driver support # Description = SARADC driver support # Option_Selection = TRUE, FALSE CONFIG_SARADC_SUPPORT = TRUE
5.3. SYSDESC配置¶
chipname_xxx.sys文件位于sc/driver/sysdriver/sysdesc/hal/chipname/pub
<adclp0>
[reg_u32] 0x2002800;
[interrupts_u32] INT_PM_IRQ_SAR_KP;
[camclk_u16] CAMCLK_sar;
[interrupts_en_u8] 1;
[ref_vol_u32] 1800;
[upper_bound_u16] 0x3FF;
[lower_bound_u16] 0;
[status_u8] 0;
| 属性 | 描述 | 设定值 | 备注 |
|---|---|---|---|
| reg_u32 | 设定adclp bank地址 | 0x2002800 | 禁止修改 |
| interrupts_u32 | 设定硬件中断号 | INT_PM_IRQ_SAR_KP | 禁止修改 |
| camclk_u16 | 设定时钟源 | CAMCLK_sar | 禁止修改 |
| interrupts_en_u8 | 使能中断 | 1:enable, 2:disable | 可根据需要修改 |
| ref_vol_u32 | 设定基准电压档位 | 以mv为单位,支持1800mv和1000mv | 可根据需要修改 |
| upper_bound_u16 | 设定阈值上限电压 | 0~0x3FF,使能中断有效 | 可根据需要修改 |
| lower_bound_u16 | 设定阈值下限电压 | 0~0x3FF,使能中断有效 | 可根据需要修改 |
| status_u8 | 是否adclp使能驱动 | 1:enable, 2:disable | 可根据需要修改 |
adclp使能的通道数量决定硬件的通道模式:
-
仅使能任意一个通道时,硬件使用1 channel模式
-
使能多个通道时,节点名称"adclpX"中X的最大值 < 4,硬件使用4 channel模式
-
使能多个通道时,节点名称"adclpX"中X的最大值 >= 4,硬件使用8 channel模式
5.4. PADMUX设定¶
SAR-ADCLP无需进行padmux的配置,PIN脚默认配置为ADC采样功能
5.5. Sample Code¶
demo源码位于sc/driver/sysdriver/saradc/drv/src/drv_adclp_test.c
#define ADC_CHANNEL_NUM 8
static adclp_cb_t cb_t[ADC_CHANNEL_NUM] = {0};
static u8 adclp_init[ADC_CHANNEL_NUM] = {0};
/* 回调函数,当电压超出阈值范围后该函数会被调用 */
int adclp_get_data(u8 channel)
{
u16 data;
drv_adclp_get_data(channel, &data);
cliPrintf("adclp%hhu data[%hu] exceeding bound\n", channel, data);
return 0;
}
static int adclp_test(CLI_t *cli, char *p)
{
u8 i;
int ret;
char *cmd;
u16 data;
u8 argc;
u32 channel;
argc = CliTokenCount(cli);
if (argc < 1)
goto adclp_help_exit;
cmd = CliTokenPop(cli);
if (strcmp(cmd, "init") == 0)
{
argc = CliTokenCount(cli);
if (argc != 1)
goto adclp_help_exit;
if (CliTokenPopNum(cli, &channel, 0) != eCLI_PARSE_OK)
goto adclp_help_exit;
if (channel >= ADC_CHANNEL_NUM)
{
cliPrintf("channel[%hhu] not supported\n", (u8)channel);
goto adclp_help_exit;
}
if (adclp_init[channel])
{
cliPrintf("channel[%hhu] already init\n", (u8)channel);
return eCLI_PARSE_OK;
}
//注册回调函数
cb_t[channel] = adclp_get_data;
ret = drv_adclp_register_callback(channel, cb_t[channel]);
if (ret)
return -eCLI_PARSE_INVALID_PARAMETER;
//设定阈值
ret = drv_adclp_set_bound((u8)channel, 600, 400);
if (ret)
return -eCLI_PARSE_INVALID_PARAMETER;
adclp_init[channel] = 1;
}
else if (strcmp(cmd, "single") == 0)
{
argc = CliTokenCount(cli);
if (argc != 1)
goto adclp_help_exit;
if (CliTokenPopNum(cli, &channel, 0) != eCLI_PARSE_OK)
goto adclp_help_exit;
if (!adclp_init[channel])
{
cliPrintf("channel[%hhu] must init first\n", (u8)channel);
return eCLI_PARSE_OK;
}
//获取单个通道的电压数字量
ret = drv_adclp_get_data((u8)channel, &data);
if (ret)
return -eCLI_PARSE_INVALID_PARAMETER;
cliPrintf("channel[%hhu] data is[%hu]\n", (u8)channel, data);
}
else if (strcmp(cmd, "scan") == 0)
{
for (i = 0; i < ADC_CHANNEL_NUM; i++)
{
channel = i;
ret = drv_adclp_get_data((u8)channel, &data);
if (ret)
return -eCLI_PARSE_INVALID_PARAMETER;
cliPrintf("channel[%hhu] data is[%hu]\n", (u8)channel, data);
}
}
else
{
adclp_help_exit:
cliPrintf("command format : adclp init [channel]\n");
cliPrintf("command format : adclp single [channel]\n");
cliPrintf("command format : adclp scan\n");
return -eCLI_PARSE_INVALID_PARAMETER;
}
return eCLI_PARSE_OK;
}
6. API参考¶
API可参考头文件sc/driver/sysdriver/saradc/drv/pub/drv_adclp.h
enum adclp_vdd_type
{
ADCLP_VDD_CPU = 0,
ADCLP_VDD_DLA,
ADCLP_VDD_MIU,
ADCLP_VDD_CORE,
ADCLP_VDD_NODIE,
ADCLP_VSS,
};
typedef int (*adclp_cb_t)(u8 channel);
int drv_adclp_enable(u8 channel, u8 enable);
int drv_adclp_get_data(u8 channel, u16 *data);
int drv_adclp_set_bound(u8 channel, u16 upper_bound, u16 lower_bound);
int drv_adclp_vdd_data(u8 channel, u16 *data, enum adclp_vdd_type type);
int drv_adclp_register_callback(u8 channel, adclp_cb_t cb_t);
int drv_adclp_unregister_callback(u8 channel, adclp_cb_t cb_t);
6.1. drv_adclp_set_bound¶
-
目的
设定指定通道的阈值
-
语法
int drv_adclp_set_bound(u8 channel, u16 upper_bound, u16 lower_bound)
-
参数
参数名称 描述 channel 采样通道 upper_bound 阈值上限 lower_bound 阈值下限 -
返回值
返回值 描述 0 设定成功 -4 通道不支持
6.2. drv_adclp_get_data¶
-
目的
获取指定通道的外部输入电压数字量
-
语法
int drv_adclp_get_data(u8 channel, u16 *data)
-
参数
参数名称 描述 channel 采样通道 data 电压数字量 -
返回值
返回值 描述 0 采样成功 -4 通道不支持
6.3. drv_adclp_register_callback¶
-
目的
注册指定通道的回调函数(同一通道支持注册多个回调函数),当采样结果超出阈值后可在回调函数里作出相应的处理
-
语法
int drv_adclp_register_callback(u8 channel, adclp_cb_t cb_t)
-
参数
参数名称 描述 channel 采样通道 cb_t 函数指针 -
返回值
返回值 描述 0 注册成功 -6 注册失败
6.4. drv_adclp_unregister_callback¶
-
目的
释放指定通道的回调函数和注册时申请的内存
-
语法
int drv_adclp_unregister_callback(u8 channel, adclp_cb_t cb_t)
-
参数
参数名称 描述 channel 采样通道 cb_t 函数指针 -
返回值
返回值 描述 0 取消注册成功 -6 取消注册失败
6.5. drv_adclp_enable¶
-
目的
使能指定通道的采样功能
-
语法
int drv_adclp_enable(u8 channel, u8 enable);
-
参数
参数名称 描述 channel 采样通道 enable 使能与否 -
返回值
返回值 描述 0 成功 -4 通道不支持
6.6. drv_adclp_vdd_data¶
-
目的
获取特殊通道的adc code,无需外接输入电压,adc code值取决于adclp_vdd_type传入的类型
-
语法
int drv_adclp_vdd_data(u8 channel, u16 *data, enum adclp_vdd_type type)
-
参数
参数名称 描述 channel 此处指定使用8 data 电压数字量 type 枚举,可选择VDD_CORE,VDD_CPU,VDD_DLA等 -
返回值
返回值 描述 0 设定成功 -4 通道不支持
7. FAQ¶
Q1:SAR ADCLP接口不存在
-
检查sysdesc adclp节点的
status是否为1 -
检查config是否配置,详见[5.2 CONFIG配置]
Q2:外部输入电压变化,SAR ADCLP采样数据没有变化
-
当PIN脚处于GPIO MODE时,采样数据不会变化,可读取寄存器的数值判断PIN脚是否被切为GPIO MODE:
0x14 0x11 BIT0-BIT5: BIT0~BIT5的每个BIT对应一个通道,当value=0时,该通道PIN脚处于GPIO MODE,当value=1时,该通道PIN脚处于ADC MODE,比如BIT0=0时,通道0处于GPIO MODE,BIT1=1时,通道1处于ADC MODE 0x14 0x11 BIT8-BIT13: BIT8~BIT13的每个BIT对应一个通道,前提条件是PIN脚已处于GPIO MODE,当value=0时,PIN脚切换为output,当value=1时,PIN脚切换为input 0x14 0x12 BIT0-BIT5: BIT0~BIT5的每个BIT对应一个通道,前提条件是PIN脚已处于GPIO MODE并且设定为ouput,当value=0时,该通道PIN脚切换为低电平,当value=1时,该通道PIN脚切换为高电平 例如:riu_r 0x14 0x11 返回值:0x3F3F -> 全部通道为ADC MODE 返回值:0x3E3E -> 通道0为GPIO MODE,其余通道为ADC MODE 返回值:0x0000 -> 全部通道为GPIO MODE且切换为output
-
当PIN脚寄存器设定非GPIO MODE时,采样数据仍然没有变化,可将PIN脚设为GPIO MODE并进行output high/low的试验,如果PIN脚电平无法拉高拉低则可判断为硬件问题
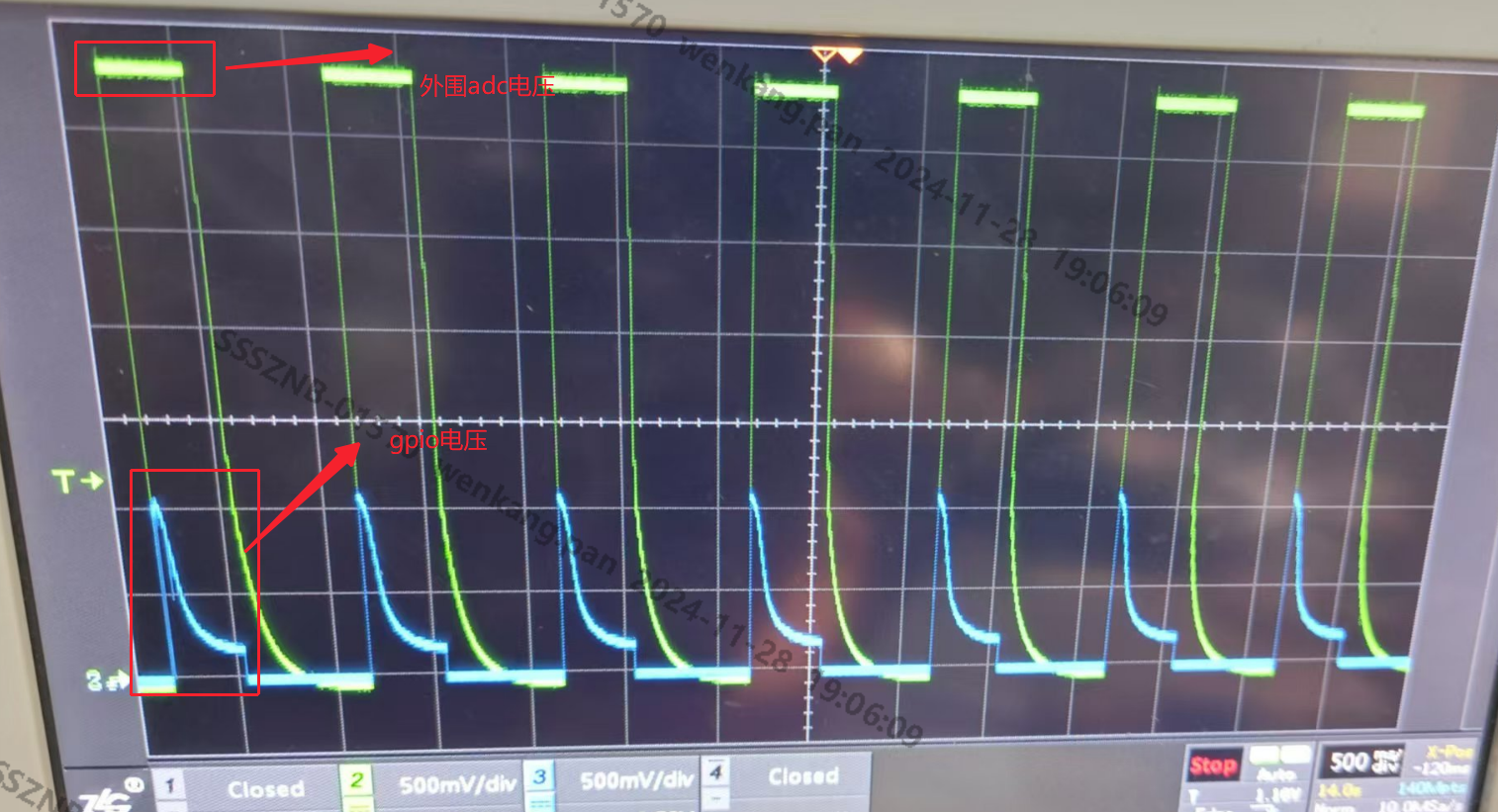
Q3:第一次或者前几次采样数据与实际输入电压偏差大
此问题大概率与采样时机有关,可通过操作GPIO作为触发源,获取每次采样时元件的电压情况,
如下图所示,触发ADC采样前,GPIO从高电平切换为低电平,ADC采样时机刚好处于电压的下降过程,并不是在电压稳定时去采样,因此被判定为采样异常,此时需要等元件稳定时再去采样