GPIO使用参考
1. 概述¶
1.1. 概述¶
GPIO 采用标准的LINUX框架,能够使用统一的接口来操作gpio。
1.2. GPIO NUM 与PAD对应表¶
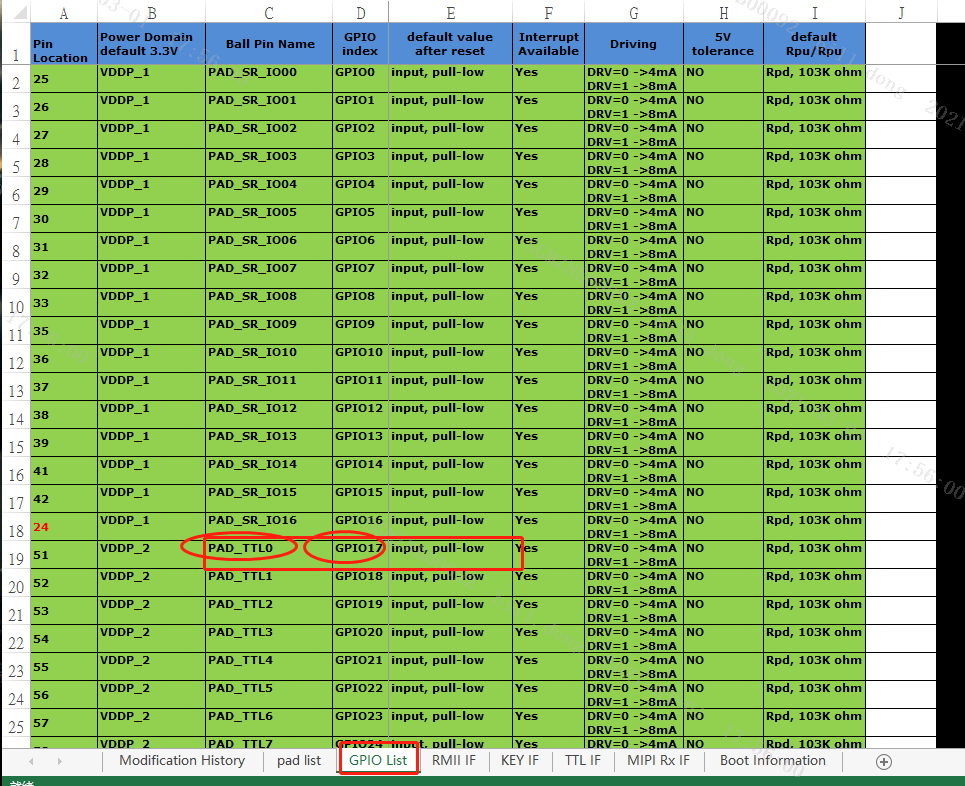
请查看硬件线路图上GPIO 的PAD name,查找这个表格,对应的num 就是要操作的GPIO的num。
例如:硬件线路图上的一个GPIO 是PAD_TTL0,如果要操作这个GPIO,对应的num =17。
开放使用的GPIO列表,请查看硬件资料的SSD2xx_HW CheckList.xlsx的GPIO List页面里面的表格,举例如下:
表1-1
2. 内核使用GPIO¶
2.1. 申请为gpio端口¶
-
目的
创建端口为GPIO。
-
语法
int gpio_request(unsigned gpio, const char *label) -
参数
参数名称 描述 gpio Gpio num label 具体名称 -
返回值
返回值 描述 0 成功。 Other 失败。
2.2. 设为输入¶
-
目的
标记gpio为输入。
-
语法
int gpio_direction_input(unsigned gpio); -
参数
参数名称 描述 gpio Gpio num -
返回值
返回值 描述 0 成功。 Other 失败。
2.3. 设为输出¶
-
目的
标记gpio为输出。
-
语法
int gpio_direction_output(unsigned gpio, int value); -
参数
参数名称 描述 gpio Gpio num value 输出值 -
返回值
返回值 描述 0 成功。 Other 失败。
2.4. 获取输入电平¶
-
目的
获取输入引脚的电平。
-
语法
int gpio_get_value(unsigned gpio); -
参数
参数名称 描述 gpio Gpio num -
返回值
返回值 描述 Int 电平值
2.5. 设置输出电平¶
-
目的
设定输出引脚的电平。
-
语法
void gpio_set_value(unsigned gpio, int value); -
参数
参数名称 描述 gpio Gpio num value 输出值 -
返回值
返回值 描述 0 成功。 Other 失败。
2.6. 注册gpio中断¶
内核下注册gpio中断可参考Kernel/drivers/sstar/gpio/test/gpio_irq_test.c。
函数介绍如下:
| 函数名 | 描述 |
|---|---|
| gpio_request | 申请使用gpio |
| gpio_direction_input | 配置gpio为输入 |
| gpio_to_irq | 获取中断号 |
| request_irq | 注册中断函数 |
| gpio_test_isr | 中断服务函数 |
| free_irq | 释放中断 |
| gpio_free | 释放gpio |
测试方法:
kernel下编译生成gpio_irq.ko,使用insmod加载模块,默认捕捉下降沿跳变,中断服务函数中处理中断事件。
3. 用户空间使用GPIO¶
用户空间访问gpio,即通过sysfs接口访问gpio
下面是/sys/class/gpio目录下的三种文件:
--export/unexport文件
--gpioN指代具体的gpio引脚
--gpio_chipN指代gpio控制器
必须知道以上接口没有标准device文件和它们的链接。

3.1. export/unexport文件接口¶
/sys/class/gpio/export,该接口只能写不能读。
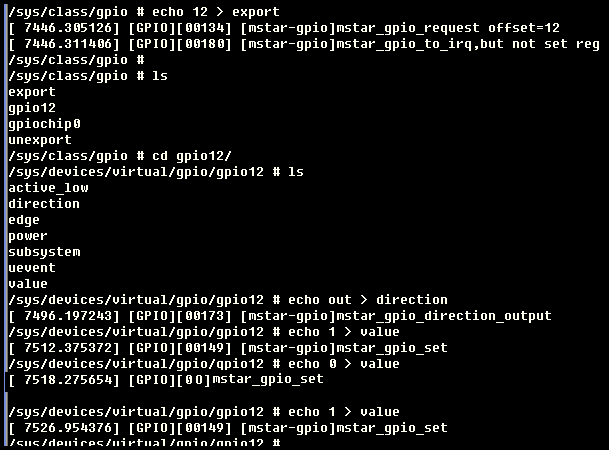
用户程序通过写入gpio的编号来向内核申请将某个gpio的控制权导出到用户空间,前提是没有内核代码申请这个gpio端口,如用户申请编号为12的GPIO的命令:
echo 12 > export
上述操作会为12号gpio创建一个节点gpio12,此时/sys/class/gpio目录下边生成一个gpio12的目录,如下图所示:

/sys/class/gpio/unexport和导出的效果相反,比如移除gpio12这个节点操作命令:
echo 12 > unexport
上述操作将会移除gpio12这个节点,如下图所示:

3.2. /sys/class/gpio/gpioN¶
指代某个具体的gpio端口,里边有如下属性文件:
**direction**表示gpio端口的方向,读取结果是in或out。也可以对该文件进行写操作,写入out 时该gpio设为输出同时电平默认为低。写入low或high时不仅可以设置为输出还可以设置指定的输出电平。 当然如果内核不支持或者内核代码不愿意,将不会存在这个属性,比如内核调用了gpio_export(N,0)就表示内核不愿意修改gpio端口方向属性 。
**value**表示gpio引脚的电平,0表示低电平,1表示高电平;如果gpio被配置为输出,这个值是可写的,记住任何非零的值都将输出为高电平。如果某个引脚被配置为中断,则可以调用poll(2)函数监听该中断,中断触发后poll(2)函数就会返回。
3.3. 代码示例¶
非中断模式
提供用户空间通过sysfs接口操作gpio的sample code源文件gpio_main.c。
写操作:
int ss_gpio_set_value(unsigned int gpio, unsigned int value)
传入要写的gpio的编号,输入参数1/0,控制高/低电平;
读操作:
int ss_gpio_get_value(unsigned int gpio, unsigned int *value)
传入要写的gpio的编号,获取当前电平状态。
编译sample code生成gpio_main可执行bin档:
# arm-linux-gnueabihf-gcc –o gpio_main gpio_main.c
在shell中运行下述命令测试gpio:
# ./gpio_main input # ./gpio_main output 1
提供用户空间通过mmap直接访问寄存器操作gpio的sample code源文件gpio_mmap.c
使用此方式操作gpio,用户需要查看GPIO_Mapping_Table,确认gpio的bank基地址以及偏移地址。以PAD_GPIO0为例:

如上表bank基地址为0x103E,偏移地址为0x3D,BIT3使能gpio mode,BIT2配置gpio方向,BIT1控制输出电平,BIT0的值为输入电平状态。
4. BOOT使用GPIO¶
4.1. CMD:gpio -Config gpio port¶
Usage: gpio (for 2nd parameter, you must type at least 3 characters) gpio output <gpio#> <1/0> : ex: gpio output 69 1 gpio input/get <gpio#> : ex: gpio input 10 (gpio 10 set as input) gpio toggle <gpio#> : ex: gpio tog 49 (toggle) gpio state <gpio#> : ex: gpio sta 49 (get i/o status(direction) & pin status) gpio list [num_of_pins] : ex: gpio list 10 (list GPIO1~GPIO10 status)
详见boot/ommon/MsSysUtility.c文件do_gpio函数实现。
4.2. API¶
4.2.1. 设为输入¶
-
目的
标记gpio为输入。
-
语法
void MDrv_GPIO_Pad_Odn(MS_GPIO_NUM u32IndexGPIO); -
参数
参数名称 描述 u32IndexGPIO Gpio num -
返回值
返回值 描述 void
4.2.2. 设为输出¶
-
目的
标记gpio为输出。
-
语法
void MDrv_GPIO_Pad_Oen(MS_GPIO_NUM u32IndexGPIO); -
参数
参数名称 描述 u32IndexGPIO Gpio num -
返回值
返回值 描述 Void
4.2.3. 获取输入电平¶
-
目的
获取输入引脚的电平。
-
语法
U8 MDrv_GPIO_Pad_Read(MS_GPIO_NUM u32IndexGPIO); -
参数
参数名称 描述 u32IndexGPIO Gpio num -
返回值
返回值 描述 unsigned char 电平值
4.2.4. 设置输出高电平¶
-
目的
设定该引脚为高电平。
-
语法
void MDrv_GPIO_Pull_High(MS_GPIO_NUM u32IndexGPIO); -
参数
参数名称 描述 gpio Gpio num
4.2.5. 设置输出低电平¶
-
目的
设定该引脚为低电平。
-
语法
void MDrv_GPIO_Pull_Low(MS_GPIO_NUM u32IndexGPIO); -
参数
参数名称 描述 gpio Gpio num