外设
1. 概述¶
SSC8x39支持的外设包括GPIOs, PWM, UART, Timers, SPI, I2C, IR, ADC, I2S等等。
图 ‑1 外设
2. GPIO¶
2.1. GPIO Index¶
GPIO API头文件Mercury5\proj\sc\driver\drv\io\pub\drv_gpio.h
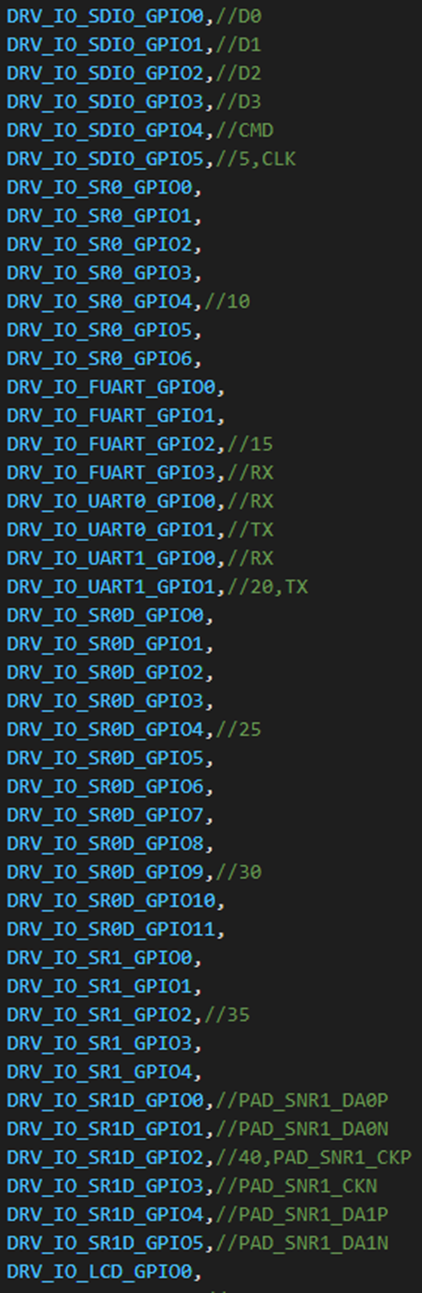
图 2‑1 头文件中的定义
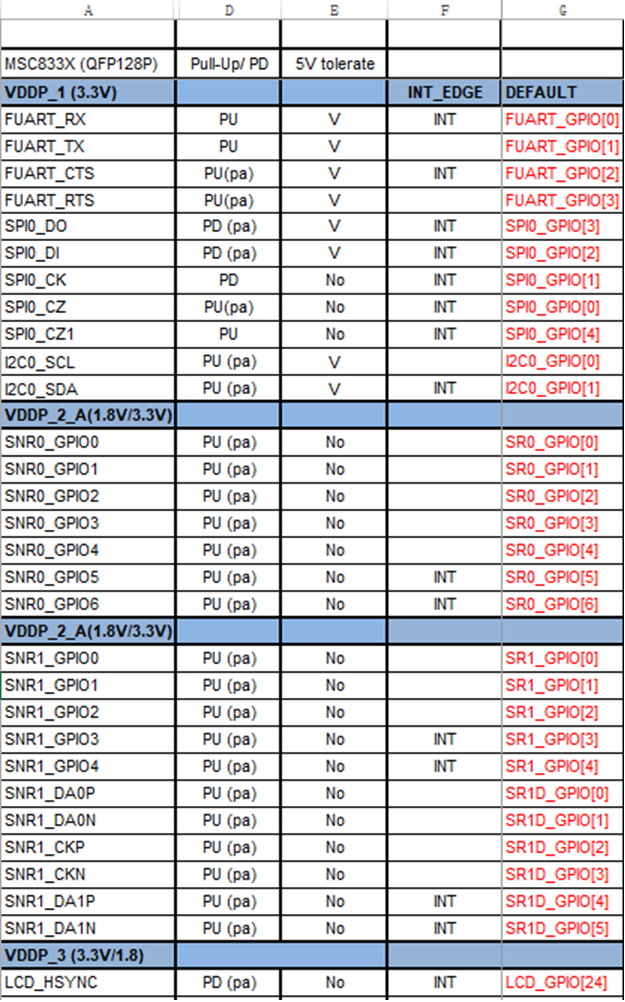
图 2‑2 HW Checklist.xls的PIN脚复用定义
通过原理图中的PIN脚命名在HW Checklist.xls中查看对应GPIO命名确定需要使用GPIO宏定义。
2.2. GPIO API¶
-
void DrvGPIOPadSet(DrvGPIOSe eGPIOIndex, bool bEnable)
-
配置GPIO复用功能
-
bEnable = TRUE时打开此PIN脚的GPIO功能,同时其他复用功能被关闭
-
-
void DrvGPIOOutputEnable(DrvGPIOSe eGPIOIndex,bool bEnable)
-
GPIO输出使能
-
bEnable = TRUE时此GPIO输出模式使能,FALSE时此GPIO输入模式使能
-
-
bool DrvGPIOGetLevel(DrvGPIOSe eGPIOIndex)
-
读取GPIO输入Level
-
输入高电平返回TRUE,输入低电平返回FALSE
-
-
bool DrvGPIOGetDirection(DrvGPIOSe eGPIOIndex)
-
获取GPIO输入输出模式
-
返回TRUE表示此GPIO为输出模式,返回FALSE表示此GPIO为输入模式
-
-
void DrvGPIOSetOutputData(DrvGPIOSe eGPIOIndex,bool bHL)
-
设定GPIO输出Level
-
bHL = TRUE,输出高电平,bHL = FALSE,输出低电平
-
-
bool DrvGPIOEnableINT(DrvGPIOSe eGPIOIndex, bool bEnable, PfnIntcISR pfCB)
-
GPIO中断使能
-
bEnable = TRUE,使能GPIO中断
-
pfCB 为中断处理回调函数
-
-
bool DrvGPIOSetPolarity(DrvGPIOSe eGPIOIndex,u8 reverse)
-
GPIO中断触发极性
-
只支持高电平/低电平触发,不支持边沿触发
-
-
bool DrvGPIOEnablePull(DrvGPIOSe eGPIOIndex,u8 bEnable)
- GPIO内部上下拉使能
-
bool DrvGPIOSetPullStatus(DrvGPIOSe eGPIOIndex,u8 bHL)
- GPIO内部上拉/下拉状态设定
-
bool DrvGPIOSetDriving(DrvGPIOSe eGPIOIndex,u8 nLevel)
- GPIO驱动电流能力设定
2.3. GPIO测试¶
在UART终端敲"io",会列出io可用方法。
/:io io gpio -- io gpio [GPIONum] [IN:1/OUT:0] [H:1/L:0] io gpiodrv -- io gpiodrv [GPIONum] [Level] io gpiopull -- io gpiopull [GPIONum] [pull enable] [pull H/L] io pwm -- io pwm [PWMIndex] [PadMode] [Freq(Hz)] [shift(%)] [duty(%)] [NOT invert]
GPIONum即GPIO对应的枚举值。
以PAD_FUART_CTS的GPIO输出功能为例,操作如下:
通过HW CheckList.xls和DrvGPIOSe枚举定义,确认PAD_FUART_CTS这个PIN对应枚举DRV_IO_FUART_GPIO2,GPIONum = 15。
输出高电平:
/:io gpio 15 0 1 ====GPIO : 15 ,Is Input? : 0, H/L : 0====
输出低电平:
/:io gpio 15 0 0 ====GPIO : 15 ,Is Input? : 0, H/L : 1====
查看HW CheckList.xls Pull-Up/Down页确定GPIO是否支持驱动设定,Driving页确定支持的Level,大多数GPIO只支持2挡设定,分别对应nLevel = 1(8mA)/ nLevel = 0(4mA)。
2.4. GPIO应用¶
-
PAD_FUART_CTS: GPIO输出高/低电平
DrvGPIOPadSet(DRV_IO_FUART_GPIO2, 1); //设置为输出 DrvGPIOOutputEnable(DRV_IO_FUART_GPIO2, 1); //设置为输出使能
在不改变GPIO输入输出状态的情况下,PadSet/OutputEnable只需要Call一次即可。
改变输出电平高低不需要重复做 PadSet/OutputEnable。
DrvGPIOSetOutputData(DRV_IO_FUART_GPIO2, 0); //输出低电平 DrvGPIOSetOutputData(DRV_IO_FUART_GPIO2, 1); //输出高电平
-
PAD_FUART_CTS: GPIO中断(注意:使用GPIO中断功能时需要通过HW CheckList.xls确认此GPIO是否支持中断功能。)
void _GPIOInputISR(void) { //中断处理函数,根据需要决定在中断中处理的业务。 UartSendTrace("_GPIOInputISR Enter!\n"); } DrvGPIOPadSet(DRV_IO_FUART_GPIO2,1); DrvGPIOEnableINT(DRV_IO_FUART_GPIO2,1, _GPIOInputISR); DrvGPIOSetPolarity(DRV_IO_FUART_GPIO2,0);//设定为低电平触发
3. I2C¶
头文件Mercury5\proj\sc\driver\drv\bus\pub\drv_bus_i2c.h
I2CErrorCode_e DrvI2cOpen(s32 *pHandle, I2COptions_t *psI2cSettings); I2CErrorCode_e DrvI2cClose(s32 nHandle); I2CErrorCode_e DrvI2cWrite(s32 nHandle, void * pDataToWrite, u32 nNbBytes, bool bStopBit); I2CErrorCode_e DrvI2cRead(s32 nHandle, void * pDataToRead, u32 nNbBytes); I2CErrorCode_e DrvI2cWriteAndRead(s32 nHandle, void * pDataToWrite, u32 nNbBytesToWrite, void * pDataToRead, u32 nNbBytesToRead); I2CErrorCode_e DrvI2cOpenSW(u32 nAddress, I2cClockSpeed_e eClkSpeed, IoChipPadNum_e eScl, IoChipPadNum_e eSda, s32 *pHandle); I2CErrorCode_e DrvI2cAddrWrite(s32 nHandle, u16 nAddress, u16 nDataToWrite, bool bStopBit); I2CErrorCode_e DrvI2cAddrRead(s32 nHandle, u16 nAddress, u16 *pDataToRead, bool bStopBit);
4. SPI¶
头文件Mercury5\proj\sc\driver\drv\bus\pub\drv_mspi.h
MSpiErrorCode_e DrvMSpiOpen(MSpiChannel_e *pHandle, MSpiSettings_t *ptMSpiSetting); MSpiErrorCode_e DrvMSpiClose(MSpiChannel_e nHandle); MSpiErrorCode_e DrvMSpiWrite(MSpiChannel_e nHandle, void *pDataToWrite, u32 nWriteLen); MSpiErrorCode_e DrvMSpiRead(MSpiChannel_e nHandle, void *pDataToRead, u32 nReadLen); MSpiErrorCode_e DrvMSpiReadEx(MSpiChannel_e nHandle, void *pDataToWrite, u32 nWriteLen, void *pDataToRead, u32 nReadLen);
SPI时钟源有108M/54M/12M,DIV有2/4/8/16/32/64/128/256,根据用户设定MSpiSettings t参数nMspiClk,driver自动计算对应Div和时钟源,SPI CLK最大支持54MHz,最小支持46875Hz。
MSPI参数设定结构体:
typedef struct { MSpiChannel_e eChannel; MSpiRWMethod_e eRWMethod; MSpiMode_e eMSpiMode; MSpiPad_e ePadSelect; u32 nMspiClk; MSpi_BufferConfig sBufferCfg; } MSpiSettings_t;
| 成员名称 | 描述 |
|---|---|
| eChannel | SPI的Channel,SPI0就是Channel0,SPI1就是Channel1 |
| eRWMethod | SPI读写方式,支持polling or interrupt |
| eMSpiMode | SPI的相位(CPHA)和极性(CPOL)模式 Mode 0 CPOL=0, CPHA=0 Mode 1 CPOL=0, CPHA=1 Mode 2 CPOL=1, CPHA=0 Mode 3 CPOL=1, CPHA=1 |
| ePadSelect | SPI的PadMux,一个SPI Channel可能有多组PIN复用,Padmux参数决定使用哪一组PIN。根据硬件原理图设计查看HW CheckList文档确定参数配置。 |
| nMspiClk | SPI Clk参数,单位Hz |
| sBufferCfg | SPI 读写数据Buffer参数配置 |
MSPI读写Buffer bits参数结构体:
typedef struct { u8 u8WBitConfig[8]; //bits will be transferred in write buffer ,0~7 means 1bit~8bit u8 u8RBitConfig[8]; //bits Will be transferred in read buffer ,0~7 means 1bit~8bit } MSpi_BufferConfig;
| 成员名称 | 描述 |
|---|---|
| u8WBitConfig[8] | MSPI最大支持8Bytes的WriterBuffer,每个Byte的有效数据bits,参数范围07,对应1bit8bit有效数据 |
| u8RBitConfig[8] | MSPI最大支持8Bytes的ReadBuffer,每个Byte的有效数据bits,参数范围07,对应1bit8bit有效数据 |
MSpiErrorCode_e eRtn; MSpiSettings_t tSetting; tSetting.eChannel = MSPI_CH1; tSetting.eMSpiMode = MSPI_MODE0; tSetting.ePadSelect = MSPI_PAD1; tSetting.eRWMethod = MSPI_RW_METHOD_POLLING; tSetting.nMspiClk = 27000000; for (i = 0 ; i < 8 ; i++) { tSetting.sBufferCfg.u8RBitConfig[i] = 7; //Read Buffer有效位数,参数7表示8bit有效 tSetting.sBufferCfg.u8WBitConfig[i] = 7; //Write Buffer 有效位数,参数7表示8bit有效 } eRtn = (DrvMSpiOpen(&eSPIHandle,&tSetting)); if(MSPI_PROC_DONE != eRtn) UartSendTrace(" MSpi Open err %d \n", eRtn); //SPI Read Data { int i; MSpiErrorCode_e eRtn; u8 aReadBuf[8] = {0}; memset(aReadBuf, 0x0, sizeof(aReadBuf)); eRtn = DrvMSpiRead(eSPIHandle, aReadBuf, sizeof(aReadBuf)); UartSendTrace("=== DrvMSpiRead res = [%d] ===\r\n", eRtn); for(i = 0 ; i < sizeof(aReadBuf) ; i++) { UartSendTrace(" %x ", aReadBuf[i]); } UartSendTrace("\r\n"); } //SPI Write Data { MSpiErrorCode_e eRtn; u8 aWriteBuf[8] = {0}; memset(aWriteBuf, 0x0, sizeof(aWriteBuf)); aWriteBuf[0] = 0x00; aWriteBuf[1] = 0x01; aWriteBuf[2] = 0x02; aWriteBuf[3] = 0x03; aWriteBuf[4] = 0x04; aWriteBuf[5] = 0x05; aWriteBuf[6] = 0x06; aWriteBuf[7] = 0x07; eRtn = DrvMSpiWrite(eSPIHandle, aWriteBuf, sizeof(aWriteBuf)); UartSendTrace("=== DrvMSpiWrite res = [%d] ===\r\n", eRtn); }
5. UART¶
头文件Mercury5\proj\sc\driver\drv\uart\inc\drv_uart.h
s32 uart_Open( Uart_Num_t uart_num, Uart_cfg_t *uart_cfg ); void uart_SetRate(Uart_Num_t uart_num, vm_v24_Rate_t Rate ); void uart_SetFraming( Uart_Num_t uart_num, vm_v24_Framing_t Framing ); s32 uart_Write( Uart_Num_t uart_num, u8 *string, u32 length); s32 uart_Read( Uart_Num_t uart_num, u8 *string, u32 length); s32 uart_GetRxFifoLevel( Uart_Num_t uart_num); bool uart_IsTxFifoEmpty( Uart_Num_t uart_num); s32 uart_ClearRxBuffer( Uart_Num_t uart_num);
UART配置参数结构体:
typedef struct { vm_v24_SerialLength_t length; ///< length in number of bits vm_v24_SerialParity_t parity; ///< parity vm_v24_SerialStop_t stop; ///< stop bit vm_v24_Rate_t rate; ///< bit rate vm_v24_FlowControl_t RxFlowCtrlMethod; ///< type of Rx flow control vm_v24_FlowControl_t TxFlowCtrlMethod; ///< type of Tx flow control u8 signal_mask; ///< signals to use u8 padMode; ///< pad mode UartCallbackData_t rxCallback; ///< callback called when data received in hardware FIFO UartCallbackData_t txCallback; ///< callback called when all data of software FIFO sent UartCallbackInd_t EvtCallback; ///< callback called when UART event raise of type \ref Uart_Ind_t u32 dmaEnable; ///< TX/RX by dma> u32 autoCtsRts; } Uart_cfg_t;
| 成员名称 | 描述 |
|---|---|
| length | Uart Data bits长度参数 typedef enum { VM_V24_5BIT_LENGTH, ///< 5 bits per char VM_V24_6BIT_LENGTH, ///< 6 bits per char VM_V24_7BIT_LENGTH, ///< 7 bits per char VM_V24_8BIT_LENGTH ///< 8 bits per char } vm_v24_SerialLength_t; |
| parity | Uart奇偶校验位参数 typedef enum { VM_V24_NO_PARITY, ///< no parity checking VM_V24_ODD_PARITY, ///< odd parity VM_V24_EVEN_PARITY, ///< even parity VM_V24_SPACE_PARITY = VM_V24_EVEN_PARITY |
| stop | Uart 停止位参数 typedef enum { VM_V24_1STOP_BIT, ///< 1 stop bit VM_V24_2STOP_BIT ///< 2 stop bits } vm_v24_SerialStop_t; |
| rate | Uart波特率参数 typedef enum { VM_V24_1200, ///< 1200 bauds VM_V24_2400, ///< 2400 bauds VM_V24_4800, ///< 4800 bauds VM_V24_9600, ///< 9600 bauds VM_V24_19200, ///< 19200 bauds VM_V24_38400, ///< 38400 bauds VM_V24_57600, ///< 57600 bauds VM_V24_115200, ///< 115200 bauds VM_V24_300, ///< 300 bauds VM_V24_600, ///< 600 bauds VM_V24_230400, ///< 230400 bauds VM_V24_460800, ///< 460800 bauds VM_V24_921600, ///< 921600 bauds VM_V24_UNDEFINED_RATE, ///< undefined baudrate #ifdef DOWNLOADER VM_OV13_V24_NB_RATES, VM_OV13_V24_SET_AUTOBAUD = 0x80, VM_V24_SET_AUTOBAUD /* to active autobauding */ #else VM_V24_SET_AUTOBAUD ///< to active autobauding #endif } vm_v24_Rate_t; |
| RxFlowCtrlMethod | Uart Rx流控方式参数,FastUart时使用VM_V24_HARD,Normal Uart则使用VM_V24_NONE typedef enum { VM_V24_NONE, VM_V24_HARD, /* RTS/CTS * / VM_V24_SOFT, /* XON/XOFF */ VM_V24_HARD_SOFT = VM_V24_HARD | VM_V24_SOFT } vm_v24_FlowControl_t; |
| TxFlowCtrlMethod | Uart Tx流控方式参数,同RxFlowCtrlMethod |
| signal_mask | Uart PIN信号Mask,FastUart需要Mask RX/TX/RTS/CTS 4个PIN,Normal Uart只需要Mask RX/TX两个PIN。 typedef enum { VM_V24_SIGNAL_RX, ///< Rxd (from PC to BaseBand) pin VM_V24_SIGNAL_TX, ///< Txd (from BaseBand to PC) pin VM_V24_SIGNAL_RTS, ///< RTS (Ready To Send) pin VM_V24_SIGNAL_CTS, ///< CTS (Clear To Send) pin VM_V24_SIGNAL_DTR, ///< DTR pin VM_V24_SIGNAL_DSR, ///< DSR pin VM_V24_SIGNAL_RI, ///< Ring Indicator pin VM_V24_SIGNAL_DCD, ///< DCD pin VM_V24_SIGNAL_BRK, ///< Break pin (fake signal) VM_V24_SIGNAL_LAST ///< last signal }vm_v24_Signal_t; |
| padMode | Uart PadMux参数 配置Uart Channel 使用的复用PIN脚。 |
| rxCallback | RX回调函数,用于处理Uart接收数据 |
| txCallback | TX回调函数,用于处理Uart发送数据 |
| EvtCallback | NA |
| dmaEnable | DMA使能,仅Fast Uart支持,Normal Uart 设0 |
| autoCtsRts | 流控使能,仅Fast Uart支持,Normal Uart 设0 |
Uart_num参数说明:
typedef enum { UART_1, UART_2, UART_3, FUART, NB_UART } Uart_Num_t;
SDK应用层Uart Num枚举定义与HW CheckList以及其它硬件资料中UartNum不一致,使用Uart时需要注意:
-
UART_1对应硬件资料的UART0
-
UART_2对应硬件资料的UART1
-
UART_3对应硬件资料的UART2
-
FUART对应硬件资料的FUART
PAD_SNR1_DA0P/PAD_SNR1_DA0N这组PIN复用位UART2的Mode7时,软件使用示例如下:
//Rx CallBack void Uart_rxCallback(Uart_Num_t uart_num, u8 *buffer, u32 size) { UartSendTrace("# Uart_rxCallback -%d read[%d] sz[%d]\r\n", __LINE__, *buffer, size); } //Uart Init { Uart_cfg_t uart_cfg; memset(&uart_cfg, 0, sizeof(Uart_cfg_t)); uart_cfg.length = VM_V24_8BIT_LENGTH; uart_cfg.parity = VM_V24_NO_PARITY; uart_cfg.stop = VM_V24_1STOP_BIT; uart_cfg.padMode = 7; uart_cfg.rate = VM_V24_115200; uart_cfg.signal_mask = (VM_V24_SIGNAL_RX | VM_V24_SIGNAL_TX); uart_cfg.RxFlowCtrlMethod = VM_V24_NONE; uart_cfg.TxFlowCtrlMethod = VM_V24_NONE; uart_cfg.autoCtsRts = 0; uart_cfg.rxCallback = Uart_rxCallback; uart_cfg.txCallback = NULL; uart_cfg.EvtCallback = NULL; uart_Open(UART_3, &uart_cfg); } //Uart Write { u8 u8SendString[]=”Hello,I’m UART2 Mode7!”; uart_Write(UART_3, u8SendString, sizeof(u8SendString)); }