开发环境搭建
1. SDK下载¶
从FTP下载SDK开发包,包含有Mercury5、Toolchain、Documents、Tools等文件夹。

图 1‑1 SDK开发包
-
Mercury5文件夹包含软件开发代码
-
Toolchain文件夹包含Windows和Linux两个文件夹,分别包含两个系统开发环境所需工具
-
Documents文件夹包含SCH,Training文件夹
-
Tools文件夹包含GVP、UVC、EDOG等工具
2. Windows + Cygwin 环境开发¶
-
把Toolchain\Windows目录下压缩包CygwinIPC_20170316.zip解压缩到C:\
-
双击打开C:\Cygwin\CygwinPortable.exe,任务栏会显示Cygwin图标

图 2‑1 Cygwin Icon
-
右键图标,选择"Open Bah(C:),弹出工作窗口

图 2‑2 终端窗口
-
切换路径到代码包Mercury5/proj目录下,图示为解压SDK包文件位置
图 2‑3 SDK终端窗口
-
或者打开Mercury5文件夹,右键proj,选择"OpenDirectoryInCygwin",也会弹出步骤4所示工作窗口。
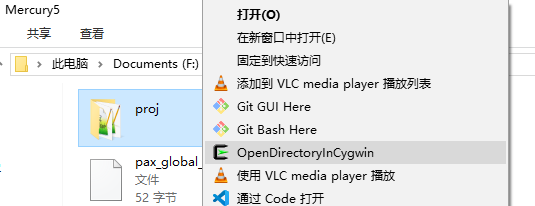
图 2‑4 启动Cygwin快捷方式
-
敲tng/configure.pl,选择 316d_32_128_msw,更新config.mak等配置
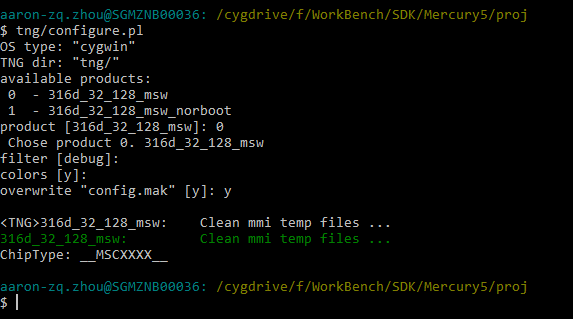
图 2‑5 更新项目配置
-
敲 make clean;make 来编译项目
图 2‑6 编译SDK
-
如果没有任何错误产生,编译完成你将会看到

图 2‑7 编译成功界面
3. Linux (ver >= Ubuntu 16) 环境开发¶
-
把Toolchain\Linux目录下压缩包gcc-linaro-arm-none-eabi-4.8-2014.04_linux.tar.xz解压到linux环境home/toolchain目录下
图 3‑1 Toolchain安装位置
-
在.bashrc文件最后一行配置环境变量,指向toolchain路径: /home/toolchain/gcc-linaro-arm-none-eabi-4.8-2014.04_linux/bin
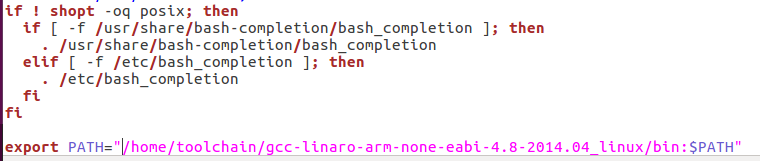
图 3‑2 Toolchain环境变量
保存退出,在新的终端窗口输入"$PATH",确认修改有效。

图 3‑3 查询环境变量
-
进入linux环境下Mercury5文件夹,右键proj,选择"Open in Terminal",打开新的终端窗口
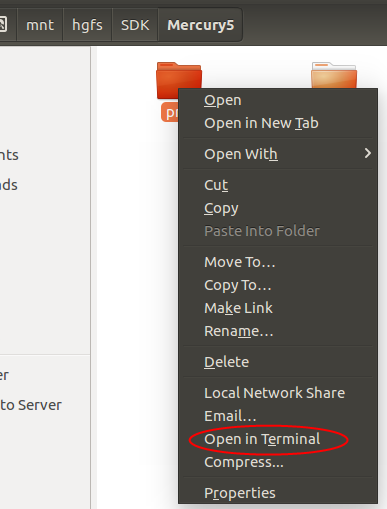
图 3‑4 打开终端窗口
-
敲tng/configure.pl,选择 316d_32_128_msw,更新config.mak等配置
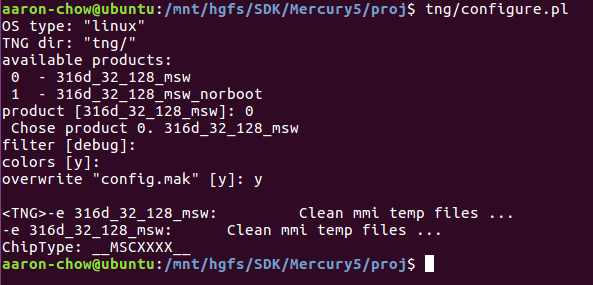
图 3‑5更新项目配置
-
敲 make clean;make 来编译项目

图 3‑6 编译SDK
4. 其它事项¶
-
Linux环境下,如果gcc-linaro-arm-none-eabi-4.8-2014.04_linux.tar.xz解压在其它路径下,需要同步更新proj\Makefile文件下ARMGCC 路径
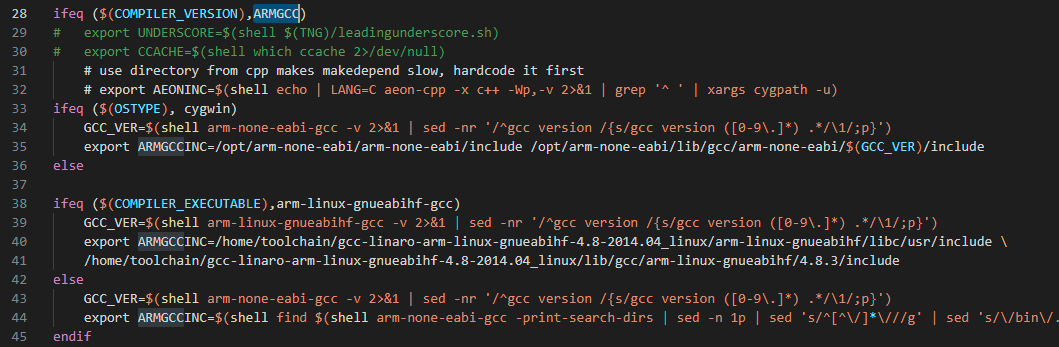
图 4‑1 同步Toolchain文件位置
-
如果只修改 .C文件,可以部分编译,具体步骤如下
-
查找包含此 .C文件的makefile文件,一般为.C文件的当前目录或上一级目录
-
终端窗口输入 make "makefile"名
-
终端窗口输入 make link
比如更新了gps_nmea0183.c,查找后发现上一级目录vendor_gps.mak有包含此.C文件。那我们在终端窗口输入:
make vendor_gps; make link即可。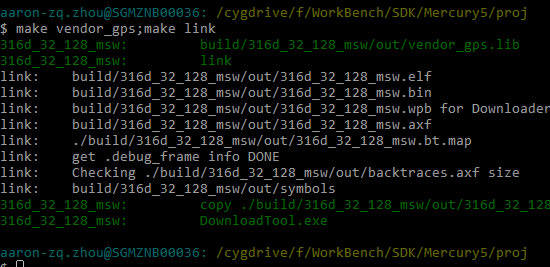
图 4‑2 单独编译某个文件
-
-
编译成功后会在proj\sc\project\Dvr_CarDV_SDK\tools\DownloadTool_M5生成3个新的文件:316d_32_128_msw.bin、316d_32_128_msw.bin.xz、SD_CarDV.bin(仅Windows环境下),其中316d_32_128_msw.bin.xz为316d_32_128_msw.bin的压缩档,生成BIN档时选择这两者中的一个即可

图 4‑3 编译生成文件
-
Ubuntu切换默认sh为bash
-
Linux环境下需要给予开发包最少 755 权限