MI DIVP API
1. 概述¶
1.1. 模块说明¶
DIVP支持对一幅输入图像进行预处理,如裁剪等,然后再对各通道分别进行缩放处理,最后输出多种不同分辨率的图像。
DIVP支持的具体图像处理功能包括:
-
图像的裁剪
-
图像像素格式转换
-
图像的旋转
-
图像的镜像操作
-
图像的拉伸和缩放
1.2. 流程框图¶

注意:不支持图像旋转的芯片列有Macaron、Taiyaki、Takoyaki、Ispahan系列。
1.3. 关键字说明¶
| 关键字 | 说明 |
|---|---|
| crop | 图像剪裁 |
| rotate | 图像旋转 |
| scaling up/down | 图像拉伸和缩放 |
| Mirror/flip | 图像镜像操作 |
| Pixel format convert | 图像像素格式转换 |
2. API 参考¶
2.1. 功能模块API¶
| API名 | 功能 |
|---|---|
| MI_DIVP_CreateChn | 创建一个 DIVP channel |
| MI_DIVP_DestroyChn | 销毁一个 DIVP channel |
| MI_DIVP_SetChnAttr | 设置 DIVP channel的属性 |
| MI_DIVP_GetChnAttr | 获取 DIVP channel的属性 |
| MI_DIVP_StartChn | 开启一个通道 |
| MI_DIVP_StopChn | 禁用一个通道 |
| MI_DIVP_SetOutputPortAttr | 设置 DIVP output port的属性 |
| MI_DIVP_GetOutputPortAttr | 获取 DIVP output port的属性 |
| MI_DIVP_RefreshChn | 在暂停的状态下刷新某个channel |
| MI_DIVP_StretchBuf | 缩放、拉伸、裁剪指定内存中的图像数据 |
| MI_DIVP_InitDev | 初始化DIVP设备 |
| MI_DIVP_DeInitDev | 反初始化DIVP设备 |
| MI_DIVP_StretchBufEx | 缩放、拉伸、裁剪指定内存区域中的图像数据,并输出到目标内存 |
2.2. MI_DIVP_CreateChn¶
-
功能
创建一个新的DIVP channel。
-
语法
MI_S32 MI_DIVP_CreateChn ( MI_DIVP_CHN DivpChn, MI_DIVP_ChnAttr_t * pstAttr);
-
形参
参数名称 描述 输入/输出 DivpChn 返回被创建的DIVP通道的ID,DIVP最多支援6个通道,取值范围[0,5] 输入 pstAttr DVIP通道属性的指针,用于设定被创建的通道的属性 输入 -
返回值
-
MI_SUCCESS 成功创建一个新的DIVP通道。
-
MI_DIVP_ERR_FAILED 创建DIVP通道失败
-
MI_DIVP_ERR_NO_RESOUCE 系统资源不足,创建DIVP通道失败
-
-
依赖
-
头文件:mi_divp.h、mi_divp_datatype.h
-
库文件:libmi_divp.so
-
-
注意
DIVP 模块最多支援6个channel,当上层创建的channel总数大于6个或者系统资源不足时会创建失败。
-
举例
MI_DIVP_CHN u32ChnId = 0; MI_DIVP_ChnAttr_t stDivpChnAttr; MI_DIVP_OutputPortAttr_t stDivpOutputPortAttr; memset(&stDivpChnAttr,0,sizeof(MI_DIVP_ChnAttr_t)); memset(&stDivpOutputPortAttr,0,sizeof(MI_DIVP_OutputPortAttr_t)); stDivpChnAttr.bHorMirror = false; stDivpChnAttr.bVerMirror = false; stDivpChnAttr.eDiType = E_MI_DIVP_DI_TYPE_OFF; stDivpChnAttr.eRotateType = E_MI_SYS_ROTATE_90; stDivpChnAttr.eTnrLevel = E_MI_DIVP_TNR_LEVEL_OFF; stDivpChnAttr.stCropRect.u16X = 0; stDivpChnAttr.stCropRect.u16Y = 0; stDivpChnAttr.stCropRect.u16Width = 1280; stDivpChnAttr.stCropRect.u16Height = 720; stDivpChnAttr.u32MaxWidth = 1920; stDivpChnAttr.u32MaxHeight = 1080; MI_DIVP_CreateChn(u32ChnId,&stDivpChnAttr); MI_DIVP_GetChnAttr(u32ChnId,&stDivpChnAttr); stDivpChnAttr.stCropRect.u16X = 0; stDivpChnAttr.stCropRect.u16Y = 0; stDivpChnAttr.stCropRect.u16Width = 1920; stDivpChnAttr.stCropRect.u16Height = 1080; MI_DIVP_SetChnAttr(u32ChnId,&stDivpChnAttr); stDivpOutputPortAttr.eCompMode = E_MI_SYS_COMPRESS_MODE_NONE; stDivpOutputPortAttr.ePixelFormat = E_MI_SYS_PIXEL_FRAME_YUV422_YUYV; stDivpOutputPortAttr.u32Width = 1920; stDivpOutputPortAttr.u32Height = 1080; MI_DIVP_SetOutputPortAttr(u32ChnId,&stDivpOutputPortAttr); MI_DIVP_StartChn(u32ChnId); //exit flow MI_DIVP_StopChn(u32ChnId); MI_DIVP_DestroyChn(u32ChnId);
-
相关主题
2.3. MI_DIVP_DestroyChn¶
-
功能
销毁一个 DIVP通道。
-
语法
MI_S32 MI_DIVP_DestroyChn(MI_DIVP_CHN DivpChn); -
形参
参数名称 描述 输入/输出 DivpChn 被销毁的DVIP通道的ID 输入 -
返回值
-
MI_SUCCESS 成功销毁DVIP通道。
-
MI_DIVP_ERR_FAILED 销毁DVIP通道失败。
-
-
依赖
-
头文件:mi_divp.h、mi_divp_datatype.h
-
库文件:libmi_divp.so
-
-
相关主题
2.4. MI_DIVP_SetChnAttr¶
-
功能
设置 DIVP channel的属性。
-
语法
MI_S32 MI_DIVP_SetChnAttr( MI_DIVP_CHN DivpChn, MI_DIVP_ChnAttr_t * pstAttr);
-
形参
参数名称 描述 输入/输出 DivpChn DIVP 通道的ID 输入 pstAttr 设定的DVIP通道的属性的结构体指针 输入 -
返回值
-
MI_SUCCESS 成功设定DIVP通道的属性
-
MI_DIVP_ERR_FAILED 设置DIVP通道的属性失败,MI_ERR_INVALID_PARAMETER 传入的参数有问题,请参考MI_DIVP_ChnAttr_t
-
-
依赖
-
头文件:mi_divp.h、mi_divp_datatype.h
-
库文件:libmi_divp.so
-
-
注意
通道属性结构体成员中输入图像的最大宽度与最大高度为静态属性,通道创建后不能改变。
-
相关主题
2.5. MI_DIVP_GetChnAttr¶
-
功能
获取 DIVP channel的属性。
-
语法
MI_S32 MI_DIVP_GetChnAttr( MI_DIVP_CHN DivpChn, MI_DIVP_ChnAttr_t * pstAttr);
-
形参
参数名称 描述 输入/输出 DivpChn DIVP 通道的ID 输入 pstAttr 传回的DVIP通道的属性的结构体指针 输出 -
返回值
-
MI_SUCCESS 成功获取DIVP通道的属性。
-
MI_DIVP_ERR_FAILED 获取DIVP通道的属性失败。
-
-
依赖
-
头文件:mi_divp.h、mi_divp_datatype.h
-
库文件:libmi_divp.so
-
-
注意
第一次获取时返回创建时的初始值。
-
相关主题
2.6. MI_DIVP_StartChn¶
-
功能
开启一个通道。
-
语法
MI_S32 MI_DIVP_StartChn(MI_DIVP_CHN DivpChn); -
形参
参数名称 描述 输入/输出 DivpChn DIVP 通道的ID 输入 -
返回值
-
MI_SUCCESS 成功启用DIVP通道。
-
MI_DIVP_ERR_FAILED 启用DIVP通道失败。
-
-
依赖
-
头文件:mi_divp.h、mi_divp_datatype.h
-
库文件:libmi_divp.so
-
-
注意
通道必须已经被创建,且没有被销毁。
-
相关主题
2.7. MI_DIVP_StopChn¶
-
功能
禁用一个通道。
-
语法
MI_S32 MI_DIVP_StopChn(MI_DIVP_CHN DivpChn); -
形参
参数名称 描述 输入/输出 DivpChn DIVP 通道的ID 输入 -
返回值
-
MI_SUCCESS 成功禁用DIVP通道。
-
MI_DIVP_ERR_FAILED 禁用DIVP通道失败。
-
-
依赖
-
头文件:mi_divp.h、mi_divp_datatype.h
-
库文件:libmi_divp.so
-
-
注意
重复禁用一个通道会返回MI_SUCCESS。
-
相关主题
2.8. MI_DIVP_SetOutputPortAttr¶
-
功能
DIVP 通道上output port的属性。
-
语法
MI_S32 MI_DIVP_SetOutputPortAttr ( MI_DIVP_CHN DivpChn, MI_DIVP_OutputPortAttr_t* pstOutputPortAttr);
-
形参
参数名称 描述 输入/输出 DivpChn DIVP 通道的ID 输入 pstOutputPortAttr Output port的属性的指针 输入 -
返回值
-
MI_SUCCESS 成功设定DIVP通道绑定的output port的属性。
-
MI_DIVP_ERR_FAILED 设定DIVP通道绑定的output port的属性失败。
-
-
依赖
-
头文件:mi_divp.h、mi_divp_datatype.h
-
库文件:libmi_divp.so
-
-
相关主题
2.9. MI_DIVP_GetOutputPortAttr¶
-
功能
获取 DIVP output port的属性。
-
语法
MI_S32 MI_DIVP_GetOutputPortAttr( MI_DIVP_CHN DivpChn, MI_DIVP_OutputPortAttr_t* pstOutputPortAttr);
-
形参
参数名称 描述 输入/输出 DivpChn DIVP 通道的ID 输入 pstOutputPortAttr Output port的属性的指针 输出 -
返回值
-
MI_SUCCESS 成功获取DIVP通道绑定的output port的属性。
-
MI_DIVP_ERR_FAILED 获取DIVP通道绑定的output port的属性失败。
-
-
依赖
-
头文件:mi_divp.h、mi_divp_datatype.h
-
库文件:libmi_divp.so
-
-
相关主题
2.10. MI_DIVP_RefreshChn¶
-
功能
暂停状态下刷新DIVP channel。
-
语法
MI_S32 MI_DIVP_RefreshChn ( MI_DIVP_CHN DivpChn);
-
形参
参数名称 描述 输入/输出 DivpChn 被刷新的channel的ID 输入 -
返回值
-
MI_SUCCESS 成功刷新DIVP的channel。
-
MI_DIVP_ERR_NO_CONTENT 该通道没有内容。
-
-
依赖
-
头文件:mi_divp.h、mi_divp_datatype.h
-
库文件:libmi_divp.so
-
-
注意
该接口适用于channel在暂停的状态下重新刷新。
-
举例
DIVP绑定VDEC的场景下,调用该接口,DIVP可以保留VDEC停止送流后的最后一帧画面,并重复处理然后送给后端,直到VDEC重新开始送流,DIVP才会处理新的画面。
2.11. MI_DIVP_StretchBuf¶
-
功能
缩放、拉伸、裁剪指定内存区域中的图像数据,并输出到目标内存。
-
语法
MI_S32 MI_DIVP_StretchBuf(MI_DIVP_DirectBuf_t *pstSrcBuf, MI_SYS_WindowRect_t *pstSrcCrop, MI_DIVP_DirectBuf_t *pstDstBuf);
2.12. MI_DIVP_InitDev¶
-
描述
初始化divp设备。
-
语法
MI_S32 MI_DIVP_InitDev(MI_DIVP_InitParam_t *pstInitParam); -
参数
参数名称 描述 输入/输出 pstInitParam 设备初始化参数 输入 -
返回值
-
MI_OK 成功
-
非M_OK 失败,参照错误码。
-
-
依赖
-
头文件:mi_divp.h、mi_divp_datatype.h
-
库文件:libmi_divp.so
-
2.13. MI_DIVP_DeInitDev¶
-
描述
反初始divp设备。
-
语法
MI_S32 MI_DIVP_DeInitDev(void); -
返回值
-
MI_OK 成功。
-
非MI_OK 失败,参照错误码。
-
-
依赖
-
头文件:mi_divp.h、mi_divp_datatype.h
-
库文件:libmi_divp.so
-
-
注意
-
此函数必须在初始化设备后调用,否则返回失败。
-
如果本接口在app退出前没有调用,内部会自动反初始化设备。
-
-
形参
|参数名称|描述|输入/输出| |---|---|---|---| |pstSrcBuf| 用来存放待处理图像内存信息的结构体指针,不可以为NULL| 输入| |pstSrcCrop |图像裁剪相关信息的结构体指针,如果不需要做裁剪,可以传NULL| 输入| |pstDstBuf| 保存处理后图像内存信息的结构体指针,不可以为NULL| 输入|
-
返回值
-
MI_SUCCESS 图像处理成功。
-
MI_DIVP_ERR_FAILED 图像处理失败。
-
-
依赖
-
头文件:mi_divp.h、mi_divp_datatype.h
-
库文件:libmi_divp.so
-
-
注意
该接口只支持YUV420SP或者ARGB8888的像素格式。
-
举例
#define SRC_WIDTH 1280 #define SRC_HEIGHT 720 #define SRC_BUFF_STRIDE (ALIGN_UP(SRC_WIDTH,16)) #define SRC_BUFF_SIZE (SRC_BUFF_STRIDE*SRC_HEIGHT*3/2) #define DST_WIDTH 640 #define DST_HEIGHT 480 #define DST_BUFF_STRIDE (ALIGN_UP(DST_WIDTH,16)) #define DST_BUFF_SIZE (DST_BUFF_STRIDE*DST_HEIGHT*3/2) #define CROP_X 200 #define CROP_Y 100 #define CROP_W 68 #define CROP_H 48 int main(void) { MI_PHY phySrcBufAddr = 0; MI_PHY phyDstBufAddr = 0; MI_DIVP_DirectBuf_t stSrcBuf; MI_DIVP_DirectBuf_t stDstBuf; MI_SYS_WindowRect_t stSrcCrop; MI_SYS_MMA_Alloc(NULL, SRC_BUFF_SIZE, &phySrcBufAddr); MI_SYS_MMA_Alloc(NULL, DST_BUFF_SIZE, &phyDstBufAddr); stSrcBuf.ePixelFormat = E_MI_SYS_PIXEL_FRAME_YUV_SEMIPLANAR_420; stSrcBuf.u32Width = SRC_WIDTH; stSrcBuf.u32Height = SRC_HEIGHT; stSrcBuf.u32Stride[0] = SRC_BUFF_STRIDE; stSrcBuf.u32Stride[1] = SRC_BUFF_STRIDE; stSrcBuf.phyAddr[0] = phySrcBufAddr; stSrcBuf.phyAddr[1] = stSrcBuf.phyAddr[0] + SRC_BUFF_STRIDE*SRC_HEIGHT; stDstBuf.ePixelFormat = E_MI_SYS_PIXEL_FRAME_YUV_SEMIPLANAR_420; stDstBuf.u32Width = DST_WIDTH; stDstBuf.u32Height = DST_HEIGHT; stDstBuf.u32Stride[0] = DST_BUFF_STRIDE; stDstBuf.u32Stride[1] = DST_BUFF_STRIDE; stDstBuf.phyAddr[0] = phyDstBufAddr; stDstBuf.phyAddr[1] = stDstBuf.phyAddr[0] + DST_BUFF_STRIDE*DST_HEIGHT; stSrcCrop.u16X = CROP_X; stSrcCrop.u16Y = CROP_Y; stSrcCrop.u16Width = CROP_W; stSrcCrop.u16Height = CROP_H; if(FillSrcBuf("./1280x720_yuv420.yuv", &stSrcBuf)) return NULL; if(MI_SUCCESS == MI_DIVP_StretchBuf(&stSrcBuf, &stSrcCrop, &stDstBuf)) { if(DumpDstBuf(&stDstBuf)) return NULL; } MI_SYS_MMA_Free(phySrcBufAddr); MI_SYS_MMA_Free(phyDstBufAddr); } //fill src buff with yuv420/argb8888 image data static int FillSrcBuf(const char* FilePath,MI_DIVP_DirectBuf_t *pstDirectSrcBuf) { int ret = 0; FILE *fp; void *pVirSrcBufAddr = NULL; int LineIdx = 0; int ReadSize = 0; fp = fopen(FilePath,"r"); if(!fp) { divp_ut_dbg("open file[%s] failed\n",FilePath); ret = -1; goto EXIT; } MI_SYS_Mmap(pstDirectSrcBuf->phyAddr[0], SRC_BUFF_SIZE, &pVirSrcBufAddr, FALSE); if(!pVirSrcBufAddr) { divp_ut_dbg("mmap dst buff failed\n"); ret = -1; goto EXIT; } for(LineIdx = 0; LineIdx < SRC_HEIGHT*3/2; LineIdx++) { ReadSize += fread(pVirSrcBufAddr+LineIdx*SRC_BUFF_STRIDE, 1, SRC_WIDTH, fp); } if(ReadSize < SRC_WIDTH*SRC_HEIGHT*3/2) { fseek(fp, 0, SEEK_SET); ReadSize = 0; for(LineIdx = 0; LineIdx < SRC_HEIGHT*3/2; LineIdx++) { ReadSize += fread(pVirSrcBufAddr+LineIdx*SRC_BUFF_STRIDE, 1, SRC_WIDTH, fp); } if(ReadSize < SRC_WIDTH*SRC_HEIGHT*3/2) { divp_ut_dbg("read file failed, read size:%d\n",ReadSize); ret = -1; goto EXIT; } } EXIT: if(fp) fclose(fp); if(pVirSrcBufAddr) MI_SYS_Munmap(pVirSrcBufAddr, SRC_BUFF_SIZE); return ret; } //image processing result is stored in dst buff static int DumpDstBuf(MI_DIVP_DirectBuf_t *pstDirectDstBuf) { int ret = 0; FILE *fp; void *pVirDstBufAddr = NULL; int LineIdx = 0; int WriteSize = 0; char outputfile[128]; struct timeval timestamp; gettimeofday(×tamp, 0); sprintf(outputfile, "output_%dx%d_%d_%08d.yuv",pstDirectDstBuf->u32Width,pstDirectDstBuf->u32Height,(int)timestamp.tv_sec,(int)timestamp.tv_usec); fp = fopen(outputfile,"w+"); if(!fp) { divp_ut_dbg("open file[%s] failed\n",outputfile); ret = -1; goto EXIT; } MI_SYS_Mmap(pstDirectDstBuf->phyAddr[0], DST_BUFF_SIZE, &pVirDstBufAddr, FALSE); if(!pVirDstBufAddr) { divp_ut_dbg("mmap dst buff failed\n"); ret = -1; goto EXIT; } for(LineIdx = 0; LineIdx < DST_HEIGHT*3/2; LineIdx++) { WriteSize += fwrite(pVirDstBufAddr+LineIdx*DST_BUFF_STRIDE, 1, DST_WIDTH, fp); } if(WriteSize < DST_WIDTH*DST_HEIGHT*3/2) { divp_ut_dbg("write file failed, write size:%d\n",WriteSize); } fflush(fp); sync(); divp_ut_dbg("save stretch dst buff to[%s]\n",outputfile); EXIT: if(fp) fclose(fp); if(pVirDstBufAddr) MI_SYS_Munmap(pVirDstBufAddr, DST_BUFF_SIZE); return 0; }
2.14. MI_DIVP_StretchBufEx¶
-
描述
缩放、拉伸、裁剪指定内存区域中的图像数据,并输出到目标内存。
-
语法
MI_S32 MI_DIVP_StretchBufEx(MI_DIVP_DirectBuf_t *pstSrcBuf, MI_SYS_WindowRect_t *pstSrcCrop, MI_DIVP_DirectBuf_t *pstDstBuf, MI_DIVP_FilterType_e eFilterType); -
参数
参数名称 描述 输入/输出 pstSrcBuf 源buffer信息指针 输入 pstSrcCrop Crop信息指针 输入 pstDstBuf 目标buffer信息指针 输入 eFilterType 做scaling的filter type。 输入 -
返回值
-
MI_OK 成功
-
非M_OK 失败,参照错误码。
-
-
依赖
-
头文件:mi_divp.h、mi_divp_datatype.h
-
库文件:libmi_divp.so
-
3. DIVP 数据类型¶
3.1. 数据类型定义¶
| 数据类型 | 定义 |
|---|---|
| MI_DIVP_DiType_e | 定义 DIVP 的deinterlace的类型 |
| MI_DIVP_TnrLevel_e | 定义 DIVP TNR的等级 |
| MI_DIVP_FilterType_e | 定义 DIVP scaling filter type |
| MI_DIVP_OutputPortAttr_t | 定义 DIVP 绑定的output port的属性参数 |
| MI_DIVP_ChnAttr_t | 定义 DIVP 通道的属性参数 |
| MI_DIVP_DirectBuf_t | 用于图像处理的内存信息结构体 |
| MI_DIVP_InitParam_t | 定义DIVP设备初始化参数 |
注:本节已涵盖各重要的数据类型,部分未列出数据类型请参见 mi_divp_datatype.h
3.2. MI_DIVP_DiType_e¶
-
说明
定义 DIVP 的deinterlace的类型。
-
定义
typedef enum { E_MI_DIVP_DITYPE_OFF,//off E_MI_DIVP_DITYPE_2D,///2.5D DI E_MI_DIVP_DITYPE_3D,///3D DI E_MI_DIVP_DITYPE_NUM, } MI_DIVP_DiType_e;
-
成员
成员 描述 E_MI_DIVP_DITYPE_OFF DIVP通道上关闭deinterlace E_MI_DIVP_DITYPE_2D DIVP通道上开启2.5D deinterlace E_MI_DIVP_DITYPE_3D DIVP通道上开启3D deinterlace E_MI_DIVP_DITYPE_NUM DIVP通道上deinterlace类型个数 -
注意事项
-
开启DI时必须开TNR,MSR930只能支援3D DI,TNR level设定为E_MI_DIVP_TNRLEVEL_MIDDLE。
-
3D DI与rotation冲突,两个功能不能同时打开。
-
不支持DI功能的chip如下:
-
Pretzel
-
Macaron
-
Taiyaki/Takoyaki
-
Pudding
-
Ispahan
-
Ikayaki
-
-
3.3. MI_DIVP_TnrLevel_e¶
-
说明
定义 DIVP TNR的等级。
-
定义
typedef enum { E_MI_DIVP_TNRLEVEL_OFF, E_MI_DIVP_TNRLEVEL_LOW, E_MI_DIVP_TNRLEVEL_MIDDLE, E_MI_DIVP_TNRLEVEL_HIGH, E_MI_DIVP_TNRLEVEL_NUM, } MI_DIVP_TnrLevel_e;
-
成员
成员 描述 E_MI_DIVP_TNRLEVEL_OFF DIVP通道上关闭TNR E_MI_DIVP_TNRLEVEL_LOW DIVP通道上开启弱等级的TNR E_MI_DIVP_TNRLEVEL_MIDDLE DIVP通道上开启中等等级的TNR E_MI_DIVP_TNRLEVEL_HIGH DIVP通道上开启强等级的TNR E_MI_DIVP_TNRLEVEL_NUM DIVP通道上TNR等级的数量 -
注意事项
-
MSR930支持TNR,但是不支持调节TNR level。
-
不支持TNR功能的chip如下:
-
Pretzel
-
Macaron
-
Taiyaki/Takoyaki
-
Pudding
-
Ispahan
-
Ikayaki
-
-
3.4. MI_DIVP_FilterType_e¶
-
说明
定义 DIVP scaling filter type 。
-
定义
typedef enum { E_MI_DIVP_FILTER_TYPE_AUTO, E_MI_DIVP_FILTER_TYPE_BYPASS, E_MI_DIVP_FILTER_TYPE_BILINEAR, E_MI_DIVP_FILTER_TYPE_FILTER, } MI_DIVP_FilterType_e;
-
成员
成员 描述 E_MI_DIVP_FILTER_TYPE_AUTO Auto模式,会自动选择bypass或bilinear。 E_MI_DIVP_FILTER_TYPE_BYPASS Bypass模式。 E_MI_DIVP_FILTER_TYPE_BILINEAR Bilinear模式。 E_MI_DIVP_FILTER_TYPE_FILTER Filter type数目。 -
注意事项
不做scaling默认是E_MI_DIVP_FILTER_TYPE_BYPASS filter type。
-
相关数据类型及接口
3.5. MI_DIVP_OutputPortAttr_t¶
-
说明
定义 DIVP 绑定的output port的属性参数。
-
定义
typedef struct MI_DIVP_OutputPortAttr_s { MI_U32 u32Width;//output width MI_U32 u32Height;//output height MI_SYS_PixelFormat_e ePixelFormat; MI_SYS_CompressMode_e eCompMode;//compress mode }MI_DIVP_OutputPortAttr_t;
-
成员
成员名称 描述 u32Width DIVP 通道输出画面的宽度 u32Height DIVP 通道输出画面的高度 ePixelFormat DIVP 通道输出画面的像素格式 eCompMode DIVP 通道输出图像的压缩格式,DIVP通道只能输出非压缩格式的图像 -
注意事项
各系列chip DIVP输出属性差异
芯片系列\输出属性 Output Pixel format Output Stride alignment Output Width alignment Output Height alignment Output Min size Output Max size MSR930 YUV422/YUV420(NV12)/ARGB8888/ ABGR8888/ARGB1555/MST420 32 2 2 128x64 4096x4096
Pretzel YUV422 32 2 2 64x4 3840x3840 YUV420(NV12) 16 ARGB8888/ABGR8888 64 RGB565 32 Macaron YUV422 32 2 2 64x4 2688x2688 YUV420(NV12) 16 ARGB8888/ABGR8888 64 RGB565 32 Taiyaki/Takoyaki YUV422 32 2 2 64x4 1920x1920 YUV420(NV12) 16 ARGB8888/ABGR8888 64 RGB565 32 Pudding YUV422 32 2 2 Rotate:16x2
No rotate:32x43840x3840 YUV420(NV12) 16 ARGB8888/ABGR8888 64 RGB565 32 Ispahan YUV422 32 2 2 64x4 2688x2688 YUV420(NV12) 16 ARGB8888/ABGR8888 64 RGB565 32 Ikayaki YUV422 32 2 2 Rotate:16x16
No rotate:16x21920x1920 YUV420(NV12) 16 ARGB8888/ABGR8888 64 RGB565 32
3.6. MI_DIVP_ChnAttr_t¶
-
说明
定义 DIVP 通道的属性参数。
-
定义
typedef struct MI_DIVP_ChnAttr_s { MI_U32 u32MaxWidth;//support max input width MI_U32 u32MaxHeight;//support max input height MI_DIVP_TnrLevel_e eTnrLevel;//TNR level MI_DIVP_DiType_e eDiType;//DI type MI_SYS_Rotate_e eRotateType;//rotate angle MI_SYS_WindowRect_t stCropRect;//crop information MI_BOOL bHorMirror;//horizontal mirror MI_BOOL bVerMirror;//vertical mirror }MI_DIVP_ChnAttr_t;
-
成员
成员名称 描述 u32MaxWidth DIVP通道支援的input的最大宽度 u32MaxHeight DIVP通道支援的input的最大高度 eTnrLevel DIVP通道上TNR的等级 eDiType DIVP通道上DI的类型 eRotateType DIVP通道上画面旋转的角度 stCropRect DIVP通道上的crop信息 bHorMirror DIVP通道上水平方向翻转 bVerMirror DIVP通道上垂直方向翻转 -
注意事项
芯片系列\输入属性 Input Pixel format Input Stride alignment Input Width alignment Input Height alignment Input Min size Input Max size MSR930 YUV422/YUV420(NV12)/ARGB8888/ ABGR8888/ARGB1555/Tile Mode 32 YUV422:16
NV12:322 128x64 4096x4096
Pretzel YUV422 32 2 2 64x4 3840x3840 YUV420(NV12) 16 ARGB8888/ABGR8888 64 RGB565 32 Macaron YUV422 32 2 2 64x4 2688x2688 YUV420(NV12) 16 ARGB8888/ABGR8888 64 RGB565 32 Taiyaki/Takoyaki YUV422 32 2 2 64x4 1920x1920 YUV420(NV12) 16 ARGB8888/ABGR8888 64 RGB565 32 Pudding YUV422 32 2 2 Rotate:128x128
No rotate:32x43840x3840 YUV420(NV12) 16 ARGB8888/ABGR8888 64 RGB565 32 Ispahan YUV422 32 2 2 64x4 2688x2688 YUV420(NV12) 16 ARGB8888/ABGR8888 64 RGB565 32 Ikayaki YUV422 32 16 2 Rotate:16x16
No rotate:16x21920x1920 YUV420(NV12) 16 ARGB8888/ABGR8888 64
3.7. MI_DIVP_DirectBuf_t¶
-
说明
定义用于图像处理的内存信息
-
定义
typedef struct MI_DIVP_DirectBuf_s { MI_SYS_PixelFormat_e ePixelFormat; //YUV420SP or ARGB888 only MI_U32 u32Width; MI_U32 u32Height; MI_U32 u32Stride[3]; MI_PHY phyAddr[3]; }MI_DIVP_DirectBuf_t;
-
成员
成员名称 描述 ePixelFormat 图像的像素格式 u32Width 图像画面的宽度 u32Height 图像画面的高度 u32Stride 图像每行所占字节数 phyAddr Buffer的起始物理地址 -
注意事项
-
只支持YUV420SP或者ARGB8888的图像像素格式
-
u32Stride不能小于64
-
-
相关数据类型及接口
3.8. MI_DIVP_InitParam_t¶
-
说明
DIVP设备初始化参数
-
定义
typedef struct MI_DIVP_InitParam_s { MI_U32 u32DevId; MI_U8 *u8Data; } MI_DIVP_InitParam_t;
-
成员
成员名称 描述 u32DevId 设备ID u8Data 数据指针buffer -
相关数据类型及接口
4. DIVP 错误码¶
表4-1 DIVP API 返回值
| 错误代码 | 宏定义 | 描述 |
|---|---|---|
| 0x0 | MI_SUCCESS | succeeded |
| 0xa00c2002 | MI_DIVP_ERR_INVALID_CHNID | 无效的channel ID |
| 0xa00c2003 | MI_DIVP_ERR_INVALID_PARAM | 传入的参数无效 |
| 0xa00c2006 | MI_DIVP_ERR_NULL_PTR | 空指针异常 |
| 0xa00c201c | MI_DIVP_ERR_FAILED | DIVP的操作失败 |
| 0xa00c2005 | MI_DIVP_ERR_NO_RESOUCE | 无资源可以使用 |
| 0xa00c201c | MI_DIVP_ERR_NO_CONTENT | 通道中无显示内容 |
5. PROCFS介绍¶
5.1. cat¶
-
调试信息
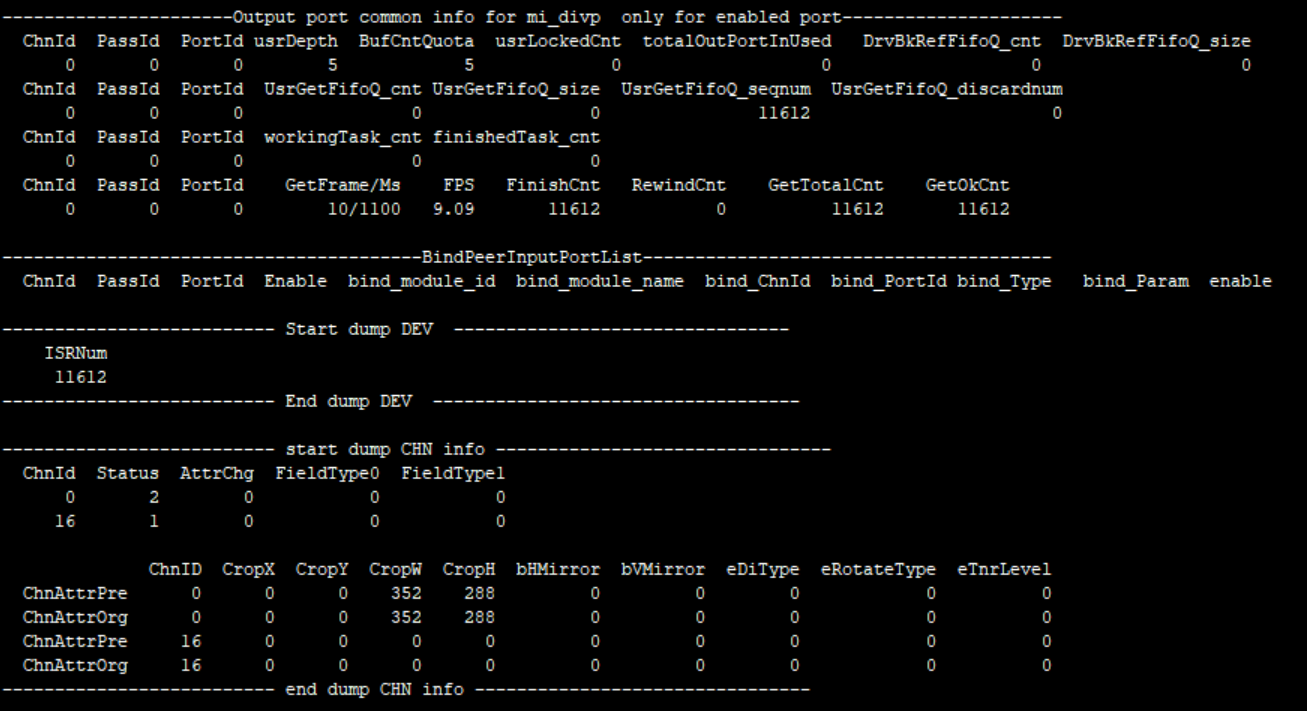
# cat /proc/mi_modules/mi_divp/mi_divp0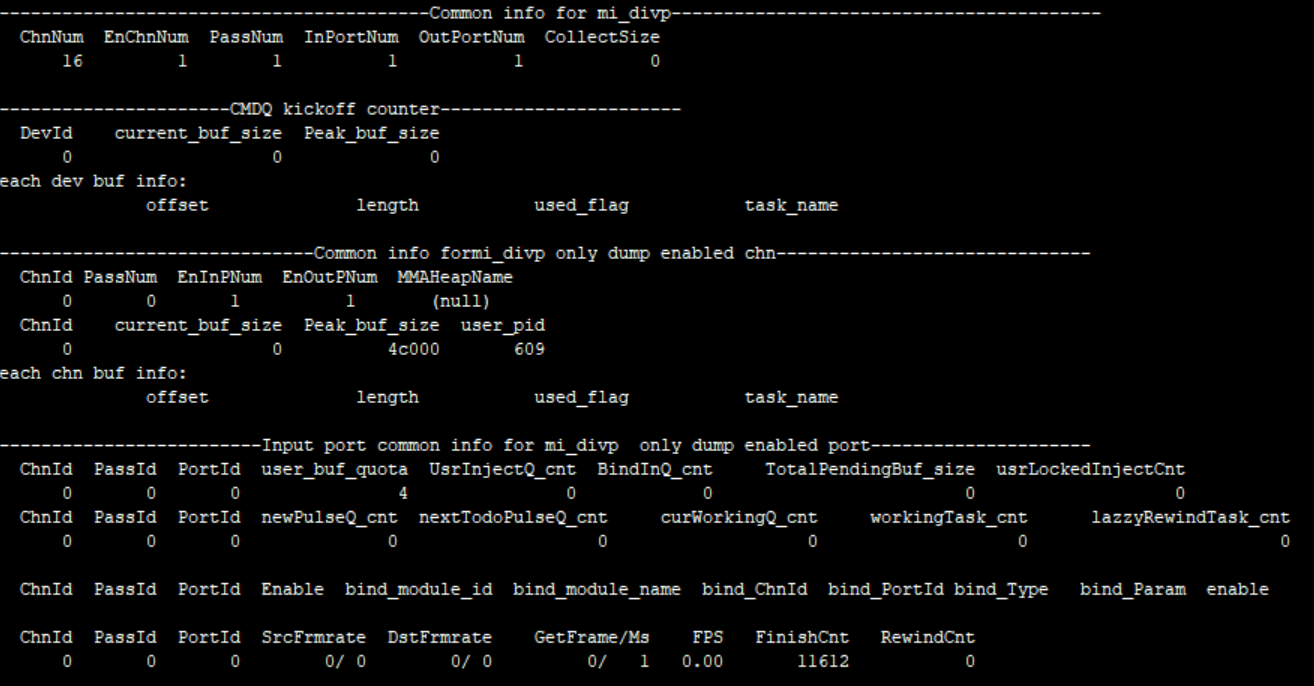

-
调试信息分析
记录当前某DIVP device的使用状况,以及device属性、layer属性、inputport/outputport属性,可以动态地获取到这些信息,方便调试和测试。
-
参数说明
参数 描述 channelinfo ChnId 0~16
16 Capture Channel 不对上层开放Status 0: INITED
1: CREATED
2: STARTED
3: STOPED
4: DISTROYEDAttrChg 0:not change
1:changedFieldType0,
FieldType1
(last two fields's type)0: NONE //no field.
1: TOP //Top field only.
2: BOTTOM //Bottom field only.
3: BOTH //Both fields.
4: NUMChnAttrPre channel的上一次设置属性 ChnAttrOrg channel的原始设置属性 CropX,CropY,
CropW,CropH上层设置的crop位置 bHMirror
bVMirror水平翻转使能
垂直翻转使能
0:disable
1:enableeDiType 0: OFF,//off
1: 2D,///2.5D DI
2: 3D,///3D DI
3: NUMeRotateType 0: NONE, //Rotate 0 degrees
1: 90, //Rotate 90 degrees
2: 180, //Rotate 180 degrees
3: 270, //Rotate 270 degrees
4: NUMeTnrLevel 0: OFF,
1: LOW,
2: MIDDLE,
3: HIGH,
4: NUMinputport info ChnId Channel ID 0~16 InputChg input port 属性是否发生变化 bIPChg 0: 隔行和逐行之间没有发生变化
1: 隔行切换到逐行,or 逐行到隔行PreWidth input port width PreHeight input port height Pixel E_MI_SYS_PIXEL_FRAME_YUV422_YUYV = 0, E_MI_SYS_PIXEL_FRAME_ARGB8888, E_MI_SYS_PIXEL_FRAME_ABGR8888, E_MI_SYS_PIXEL_FRAME_RGB565, E_MI_SYS_PIXEL_FRAME_ARGB1555, E_MI_SYS_PIXEL_FRAME_I2, E_MI_SYS_PIXEL_FRAME_I4, E_MI_SYS_PIXEL_FRAME_I8, E_MI_SYS_PIXEL_FRAME_YUV_SEMIPLANAR_422, E_MI_SYS_PIXEL_FRAME_YUV_SEMIPLANAR_420, E_MI_SYS_PIXEL_FRAME_YUV_MST_420,
//vdec mstar private video format E_MI_SYS_PIXEL_FRAME_YC420_MSTTILE1_H264, E_MI_SYS_PIXEL_FRAME_YC420_MSTTILE2_H265, E_MI_SYS_PIXEL_FRAME_YC420_MSTTILE3_H265, E_MI_SYS_PIXEL_FRAME_FORMAT_MAXStride Input的stride 2Pmode b2P_Enable值,1表示enable,0表示disable EnqueueTask Enqueue的task数目 GetInTaskCnt OnPreProcessInputTask的task数目 Outputport Info ChnId Channel ID 0~16 OutputChg Output 属性是否发生变化
0: not change
1: changedPixel 同input pixel CompMode 0 //no compress
1 //compress unit is 256 bytes as a segment
2 //compress unit is the whole line
3 //compress unit is the whole frame
4 //numberPreWidth PreHeight 上一次设置的output port 宽和高 Stride Output 的stride phyaddr Output buffer 的物理地址 FinishTaskCnt Finish task的数目 fps Output port的帧率 Common Info ChnNum Channel的总数 Pixel 同input pixel PassNum Pass的总数 InPortNum Input port的个数 OutPortNum Output port的个数 CollectSize Attach的pstAllocator数目 current_buf_size 当前申请的内存大小 Peak_buf_size 使用内存的峰值 user_pid 进程id user_buf_quota User可以拿的buffer最大个数 UsrInjectQ_cnt User inject buffer个数 BindInQ_cnt 前端给input port enqueue的buffer个数 TotalPendingBuf_size 当前input working队列中各个task总共所占的buffer size usrLockedInjectCnt 用户拿到buffer的个数 newPulseQ_cnt new_pulse_fifo_inputqueque的buffer个数 nextTodoPulseQ_cnt next_todo_pulse_inputqueue的buffer个数 curWorkingQ_cnt cur_working_input_queue的buffer个数 workingTask_cnt input_working_tasklist的task个数 lazzyRewindTask_cnt 需要retry的task个数 bind_module_id 绑定的模块id bind_module_name 绑定的模块名字 bind_ChnId 绑定模块的channel id bind_PortId 绑定模块的port id bind_Type 绑定方式:
E_MI_SYS_BIND_TYPE_FRAME_BASE = 0x00000001,
E_MI_SYS_BIND_TYPE_SW_LOW_LATENCY = 0x00000002,
E_MI_SYS_BIND_TYPE_REALTIME = 0x00000004,
E_MI_SYS_BIND_TYPE_HW_AUTOSYNC = 0x00000008,
E_MI_SYS_BIND_TYPE_HW_RING = 0x00000010bind_Param 绑定的参数 SrcFrmrate source 帧率 DstFrmrate destination帧率 GetFrame/Ms 实际帧数/所用时间 FPS 实际帧率 RewindCnt 需要retry的task个数 usrDepth User可以拿到output port buffer的最大个数 BufCntQuota Output 可以申请buffer的最大个数 usrLockedCnt User实际拿到的buffer个数 totalOutPortInUsed Outport实际申请到的buffer个数 DrvBkRefFifoQ_cnt for special driver which need to refer back pre-processed buffer DrvBkRefFifoQ_size stDrvBkRefFifoQueue 所占用的buffer size总数 UsrGetFifoQ_cnt Duplicate 到output port的buffer个数 UsrGetFifoQ_size Duplicate 到output port的buffer所占的总大小 UsrGetFifoQ_seqnum output拿到buffer的总数 UsrGetFifoQ_discardnum Output由于申请新的buffer需求而遗弃原来buffer的个数 finishedTask_cnt Output finish task的个数 GetTotalCnt Output拿到buffer总个数 GetOkCnt 统计index为E_MI_SYS_FRC_OBTAIN的帧数 ISRNum 收到的中断总数
5.2. echo¶
| 功能 | 打印接收到每一帧的PTS,如果前端是VDEC,会打印VDEC送过来的FrameID, Debug丢帧问题,正常情况下FrameID和PTS的值都是递增的。 |
|---|---|
| 命令 | echo checkframeid [ChnID] [Status] > /proc/mi_modules/mi_divp/mi_divp0 |
| 参数说明 | [ChnID] 通道号 [0~32] [Status] ON 开始打印 OFF 停止打印 |
| 举例 | echo checkframeid 0 ON/OFF > /proc/mi_modules/mi_divp/mi_divp0 [MI DIVP PROCFS]:ChnID 0, receive buffer ID = 63 , H = 0, L = 196615, PTS = 43956000 [MI DIVP PROCFS]:ChnID 0, receive buffer ID = 64 , H = 0, L = 196616, PTS = 43989000 [MI DIVP PROCFS]:ChnID 0, receive buffer ID = 65 , H = 0, L = 196615, PTS = 44022000 [MI DIVP PROCFS]:ChnID 0, receive buffer ID = 66 , H = 0, L = 196615, PTS = 44055000 [MI DIVP PROCFS]:ChnID 0, receive buffer ID = 67 , H = 0, L = 196615, PTS = 44088000 [MI DIVP PROCFS]:ChnID 0, receive buffer ID = 68 , H = 0, L = 196615, PTS = 44121000 [MI DIVP PROCFS]:ChnID 0, receive buffer ID = 69 , H = 0, L = 196614, PTS = 44154000 [MI DIVP PROCFS]:ChnID 0, receive buffer ID = 70 , H = 0, L = 196615, PTS = 44187000 receive buffer ID:每个channel接收到buffer的ID。 H/L: VDEC 送来的FrameID,H高32位,L低32位,前端不是VDEC则无该打印。 PTS: FrameBuffer的PTS。 |
| 功能 | 统计1秒时间内GetBuffer的数量,以及每拿到两个inputbuffer之间的间隔时间的 平均值,最大值,最小值,Debug丢帧问题。 |
|---|---|
| 命令 | echo statintervaltime [ChnID] ON/OFF > /proc/mi_modules/mi_divp/mi_divp0 |
| 参数说明 | [ChnID] 通道号 [0~32] [Status] ON 开始统计并打印 OFF 停止统计和打印 |
| 举例 | echo statintervaltime 0 ON > /proc/mi_modules/mi_divp/mi_divp0 [MI DIVP PROCFS]:ChnlID 0,1s FrameCnt:19,Average time: 50393 us,MAX 59601 us,57652 us,57534 us,MIN 41401 us,42415 us,42896 us [MI DIVP PROCFS]:ChnlID 0,1s FrameCnt:19,Average time: 50247 us,MAX 63004 us,62889 us,62845 us,MIN 36896 us,37120 us,37130 us [MI DIVP PROCFS]:ChnlID 0,1s FrameCnt:18,Average time: 51049 us,MAX 70431 us,59763 us,59736 us,MIN 38873 us,40109 us,40283 us [MI DIVP PROCFS]:ChnlID 0,1s FrameCnt:20,Average time: 48537 us,MAX 67168 us,67117 us,66953 us,MIN 18513 us,31242 us,32681 us [MI DIVP PROCFS]:ChnlID 0,1s FrameCnt:19,Average time: 49962 us,MAX 61416 us,61416 us,61338 us,MIN 38564 us,38736 us,38762 us FrameCnt: 1秒时间GetBuffer的数量 Average time: 拿到两个buffer之间间隔时间的平均时间 MAX:间隔时间最大的三个值。 MIN: 间隔时间最小的三个值 |
| 功能 | DIVP不再处理某一个channel,以节省频宽,验证频宽相关问题 |
|---|---|
| 命令 | echo stoponechannel [ChnID] [Status] > /proc/mi_modules/mi_divp/mi_divp0 |
| 参数说明 | [ChnID] 通道号 [0~32] [Status] ON 停止处理设置的channel OFF继续处理设置的channel |
| 举例 | echo stoponechannel 0 ON > /proc/mi_modules/mi_divp/mi_divp0 通道0的画面将会停住 |
| 功能 | Dump一张input frame。 |
|---|---|
| 命令 | echo dumpframe [ChnID] [frameStorePath] > /proc/mi_modules/mi_divp/mi_divp0 |
| 参数说明 | [ChnID] 通道号 [0~16] [frameStorePath] 指定保存input frame的位置。 |
| 举例 | #echo dumpframe 0 /customer > /proc/mi_modules/mi_divp/mi_divp0 Dump 一张 input frame保存在/customer这个路径下。 默认input frame名字比如:dump_divp_chn0_frame_w_352_h_288.yuv |
| 功能 | 打开mi divp的debug信息。 |
|---|---|
| 命令 | echo debug 0/1 > /proc/mi_modules/mi_divp/mi_divp0 |
| 参数说明 | [0/1] 0表示关闭,1表示打开。 |
| 举例 | #echo debug 1 > /proc/mi_modules/mi_divp/mi_divp0 printk in _MI_SYS_IMPL_Common_WriteProc divp debug:on #echo debug 0 > /proc/mi_modules/mi_divp/mi_divp0 printk in _MI_SYS_IMPL_Common_WriteProc divp debug:off |