系统相关
1. 使用kernel打开IPV6¶
如需添加IPV6的支持,打开kernel相关配置,同时需要ifconfig工具支持。Ifconfig工具可以通过busybox进行配置。
具体如下:
-
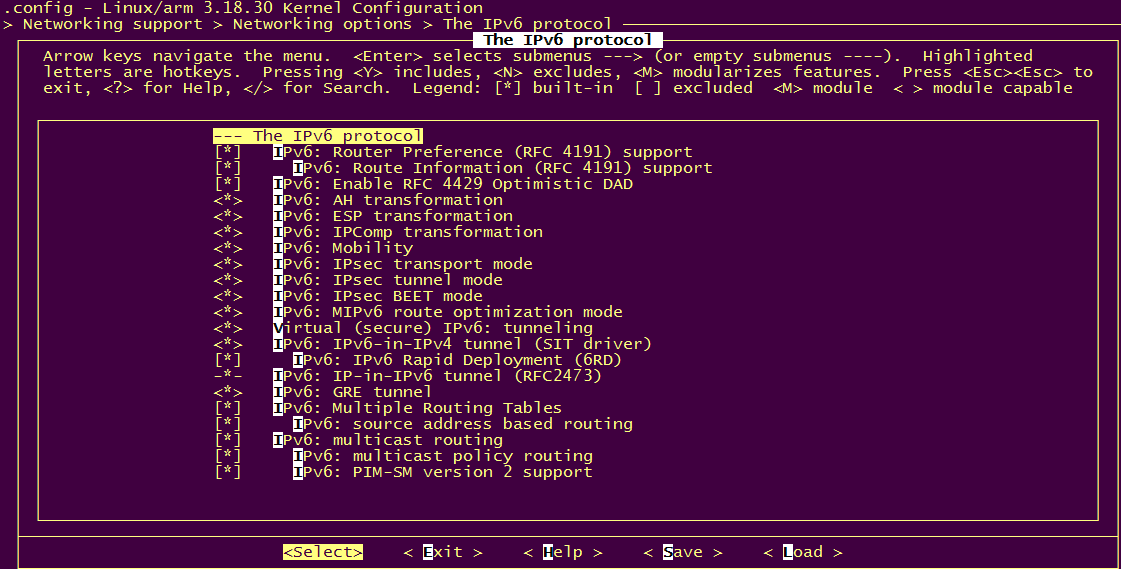
kernel中,打开ipv6的支持,如下:
-
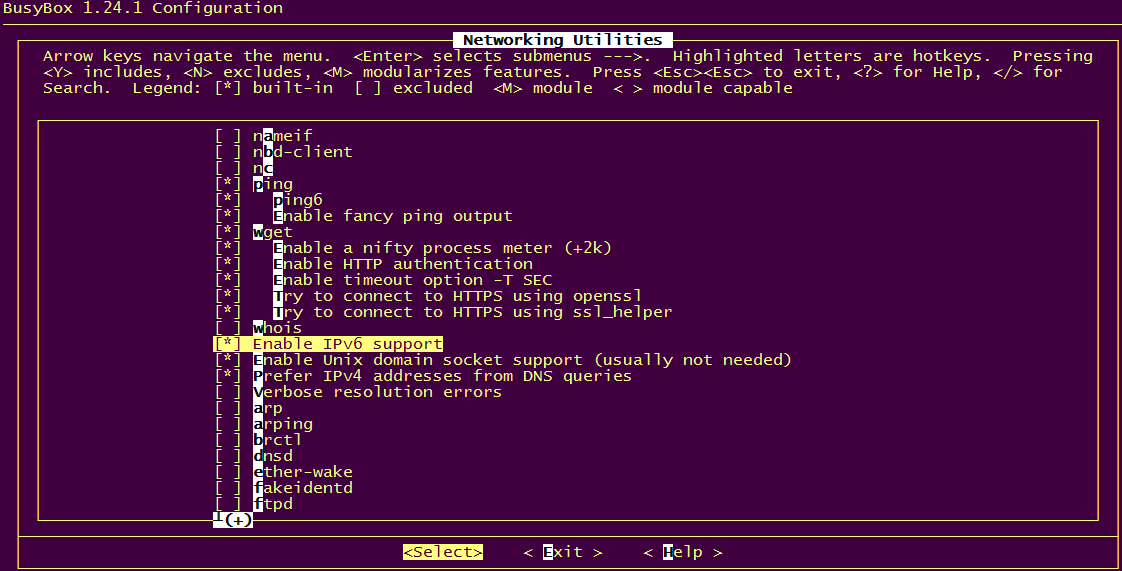
busybox中,打开ipv6的支持,如下:
-
修改rcS脚本,注销nfs驱动安装。
如果安装nfs驱动,则会出现kernel异常,可能是ipv6跟nfs驱动冲突引起,这是因为sdk自带的nfs驱动没有更新引起的。将新编译的nfs相关驱动更新到sdk中,系统可以正常运行。
2. 检测网线插入的sample code¶
int detect_ethtool(char *ifname) { int skfd; if (( skfd = socket( AF_INET, SOCK_DGRAM, 0 ) ) < 0 ) { printf("[ETHTOOL]:socket error\n"); return 2; } struct ifreq ifr; struct ethtool_value edata; memset(&ifr, 0, sizeof(ifr)); edata.cmd = ETHTOOL_GLINK; strncpy(ifr.ifr_name, ifname, sizeof(ifr.ifr_name)-1); ifr.ifr_data = (char *) &edata; if (ioctl(skfd, SIOCETHTOOL, &ifr) == -1) { printf("[ETHTOOL]ETHTOOL_GLINK failed: %s\n", strerror(errno)); close(skfd); return 2; } close(skfd); return (edata.data ? 0 : 1); }
3. neon协处理器代替cpu做memcpy的sample code¶
#include <stdio.h> #include <stdlib.h> #include <unistd.h> #include <string.h> #include <sys/time.h> #include <malloc.h> static __inline__ void* _aligned_malloc(size_t size, size_t align) { void * malloc_ptr; void * aligned_ptr; /* Error if align is not a power of two. */ if(align & (align - 1)) { // errno = EINVAL; return ((void*) 0); } if(size == 0) return ((void *) 0); /* Assume malloc'd pointer is aligned at least to sizeof (void*). If necessary, add another sizeof (void*) to store the value returned by malloc. Effectively this enforces a minimum alignment of sizeof double. */ if(align < 2 * sizeof(void *)) align = 2 * sizeof(void *); malloc_ptr = malloc(size + align); if(!malloc_ptr) return ((void *) 0); /* Align We have at least sizeof (void *) space below malloc'd ptr. */ aligned_ptr = (void *)(((size_t) malloc_ptr + align) & ~((size_t)(align) - 1)); /* Store the original pointer just before p. */ ((void **) aligned_ptr) [-1] = malloc_ptr; return aligned_ptr; } static __inline__ void _aligned_free(void * aligned_ptr) { if(aligned_ptr) free(((void **) aligned_ptr) [-1]); } void __attribute__ ((noinline)) memcpy_neon_pld(void *dest, const void *src, size_t n) { asm( "NEONCopyPLD:\n" " pld [r1, #0xC0]\n" //预取数据 " vldm r1!,{d0-d7}\n" //从参数一r0(src)加载8*8=64个单通道8位数据 " vstm r0!,{d0-d7}\n" //存储在目的地址r1(dst)中,同样是64个8位单通道8位数据 " subs r2,r2,#0x40\n" //循环跳转参数,每次减64,总共循环次数=row*col*4/64 " bgt NEONCopyPLD\n" //以前这里是bge,有问题。现在改成bgt。 ); } int main(int argc, char *argv[]) { struct timeval begin, end; unsigned char *dest, *src; unsigned i = 0, index = 0, total = 0, j,s; int size[9] = {1024, 2*1024, 4*1024, 8*1024, 16*1024, 128*1024, 512*1024 ,1024*1024, 8*1024*1024}; if (argc > 1) index = atoi(argv[1]); for(s = 0; s <= sizeof(size)/sizeof(size[0]); s++) { printf("size: %dK\n",size[s]/1024); dest = (unsigned char*)_aligned_malloc(size[s],0x40); if (NULL == dest) return 0; src = (unsigned char*)_aligned_malloc(size[s],0x40); if (NULL == src) { free(dest); return 0; } memset(src, 0x44, size[s]); memset(dest, 0x33, size[s]); for (j = 0; j < 32; j++) { gettimeofday(&begin, NULL); if (0 == index) memcpy_neon_pld(dest, src, size[s]); else memcpy(dest, src, size[s]); gettimeofday(&end, NULL); for (i = 0; i < size[s]; i++) { if (src[i] != ((dest[i]))) { printf("error %d src %d dest %d!\n", i, src[i], dest[i]); // break; } } if (i == size[s]) { int tv = 1000000 * (end.tv_sec - begin.tv_sec) + (end.tv_usec - begin.tv_usec); // printf("%d. %d us\n", j + 1, tv); total += tv; } } printf("average : %u us\n", total / 32); } _aligned_free(src); _aligned_free(dest); return 0; }
4. iperf测试网络吞吐量¶
-
server:PC client:IPC 走TC PC: iperf.exe -s IPC : iperf -c 192.168.8.100 -t 200 -i 1 (t测试次数,i表示时间间隔)
-
server:IPC client:PC 走TCP PC:iperf.exe -c 192.168.8.117 -t 200 -i 100 IPC:iperf -s
-
server:PC client:IPC 走UDP PC:iperf.exe -s -u (u表示走UDP,默认TCP) IPC:iperf -c 192.168.8.100 -t 200 -i 1 -u (-b 10m/100m指定带宽)
-
server:IPC client:PC 走UDP PC:iperf.exe -c 192.168.8.117 -t 20 -i 1 -u IPC:iperf -s -u
5. isp fifo full异常打印¶
5.1. ISP FIFO FULL¶
ISP P0 FIFO FULL(13)(0) 13 input line cnt 0 isp dma line cnt
下一帧数据来了, 但是上一帧还没有做完,发生fifo full。 fifo full发生后,软件会reset isp IP,因为fifo full 一旦发生就会一直回档,通过reset IP,尝试是否可以救回来。
5.2. 常见参数原因¶
5.2.1. 确认HDR Type 是否正确¶
im415/SCXXX VC Imx307/274 DoL
5.2.2. VIF->VPE realtime下做了scaling up¶
在realtime mode下,scl 的处理速度要比Isp更快, scaling up会导致scl处理时间更长,导致isp 比scl 快, 这样scl 就会回档前端。
5.2.3. scl clk 没有设置¶
cat /sys/class/mstar/mscl/clk
确认scl clk 是否有设置,默认345M ,code在hal_scl.c HalSclHwGetDefaultFclk1Clock
5.3. 底层原因¶
5.3.1. BW不够¶
抓取BW 数据
echo 1000 > /sys/devices/system/miu/miu0/monitor_set_duration_ms //通常取1秒的平均值 echo all > /sys/devices/system/miu/miu0/monitor_client_enable cat /sys/devices/system/miu/miu0/measure_all
注意:不要在狂刷isp fifo full 打印时去抓BW, isp fifo full打印太多,帧率会下降, 后端IP 的BW一定已经很低,这时候BW没有参考价值。 可以通过尝试降低sensor帧率或者主码流分辨率, 来找到一个临界点FIFO FULL 没有那么多,来抓BW。

通过all 的Bwmax 峰值判断BW 是否紧张,如果已经到90%,说明已经超规格了。请查看BW数据是否有异常, 是否可以调整IP 访问MIU优先级,降低BW。
另外可以尝试替换IPL 到更高的clock,可以从1866替换成2133,但要确认所用的DDR是否支持到这个频率。
但是上面提高clk 或者2133 会导致功耗更高。
5.3.2. 后端回档¶
能够造成回档的两个模块之间一定是realtime。首先要理清楚链路上有哪些realtime模块。通常有 VIF->ISP->SCL->GOP->JPEG, 在发生FIFO FULL时,将一级一级的模块拿掉,判断哪一级回档。
0x1302 0x16 bit0 handshaking ack tie enable
0: isp 吐数据scl
1: isp 断开与scl 连接。
确定scl 上bind 的GOP:
0x121a 0x60 bit0 osd0 0x64 bit0 osd1 0x68 bit0 osd2
关掉对应的Osd hal_scl.c _HalSclDmaSetJpeHandShakeConfig()
改成0,目前每一张frame 都会写reg,所以riu改没有用(在给mhal提需求提供debug 方法)。
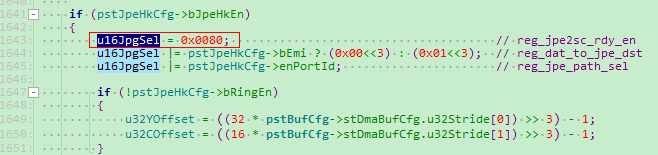
对应reg 0x1218 0x64 bit7,Jpeg to Sc ready control, 设置为0, SC 不看Jpeg 回档。
理清哪个模块造成回档, 然后抓出对应模块reg或者info 提供给我司 debug。
isp/scl debug
scl reg:
/customer/riu_r 1210; /customer/riu_r 1211; /customer/riu_r 1212 /customer/riu_r 1213; /customer/riu_r 1214; /customer/riu_r 1215 /customer/riu_r 1218; /customer/riu_r 1219; /customer/riu_r 121a /customer/riu_r 1225; /customer/riu_r 122f cat /sys/class/mstar/mscl/ints echo vpescl 8 > /sys/class/mstar/mscl/dbgmg echo halif 6 > /sys/class/mstar/mscl/dbgmg echo irq 83 > /sys/class/mstar/mscl/dbgmg cat /proc/kmsg /customer/riu_r 1302 /customer/riu_r 1304 /customer/riu_r 1308 cat /sys/class/mstar/isp0/isp_info cat /sys/class/mstar/isp0/isp_ints
5.3.3. Vsync 不均匀¶

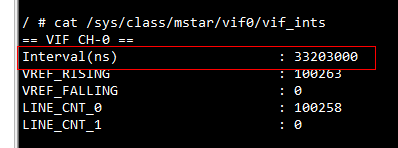
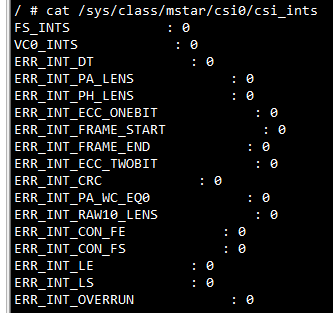
查看interval 时间是否均匀, 不均匀请联系我司进行数据分析。如果Vif这边不均匀还需要看下csi 信号接收是否有ERR_CNT。
5.3.4. Blanking 太短¶
这里说的Blanking 是指Sc Done 到下一帧Vsync 的时间。
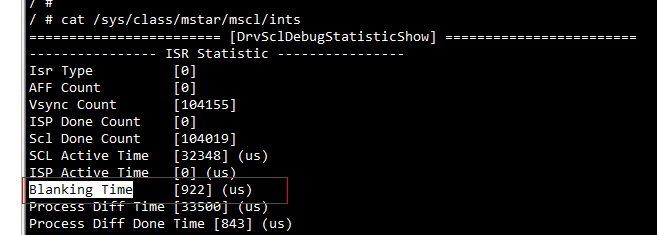
可以通过scl ints 看到对应时间, 一般应该要在500us 以上, 如果太短需要调整sensor 的vts 来调整, 调整关系为:
line_period = HMAX/(INCK*1000000)
frame_interval = line_period * VMAX*1000
INCK: master clock, 通过sensor spec 和 reg 设定得到, 一般通过降低HMAX, 提高VMAX 提高Blanking。
6. 读取芯片温度的方法¶
#include < fcntl.h > #include < stdio.h > #include < ctype.h > #include < sys/ioctl.h > #include < sys/types.h > #include < stdlib.h > #include < string.h > #define MSYS_IOCTL_MAGIC 'S' #define IOCTL_MSYS_READ_PM_TSENSOR _IO(MSYS_IOCTL_MAGIC, 0x78) int main(int argc, char* argv[]) { int fd=-1,ret; int temprature=0; fd=open("/dev/msys",O_WRONLY); if(-1==fd) { printf("fail to open msys device\n"); return 0; } while(1){ ret = ioctl(fd,IOCTL_MSYS_READ_PM_TSENSOR,&temprature); if(ret == 0)printf("temprature = %d\n",temprature); else printf("get temprature fail\n"); sleep(2); } return 0; }
或者通过命令行:
cat /sys/devices/virtual/mstar/msys/TEMP_R
7. 段错误生成core文件¶
当应用出现段错误,生成core文件的方法:
-
打开
kernel config:CONFIG_ELF_CORE;CONFIG_COREDUMP(默认已经打开) -
ulimit -c unlimited段错误出现时,产生coredump文件,并且文件大小不限制(或者可以限制足够的size)。
echo "/home/app/core.%e.%p" > /proc/sys/kernel/core_pattern指定段错误时打印core的目录。%e进程名,%p进程号,%tcode dump的时间,%s导致code dump的信号。 -
可以在应用里捕获SIGSEGV信号,然后用backtrace()函数把堆栈信息打印出来。
编译的时候需要加编译选项:
-rdynamic -funwind-tables -ffunction-sections
8. 调整分区表的方法¶
为了减少flash闲余空间,可以自行调整flash分区表。
SSC3xx系列出厂时带一段ROM code,上电执行顺序为:ROM code -> IPL -> IPL_CUST -> UBOOT->KERNEL。ROM code会从flash 0 Offset地址读取IPL,IPL和IPL_CUST会从40K,48K,60K,128K,256K,512K的位置依次查找分区表信息。UBOOT和KERNEL同理也会去固定位置依次查找分区表:
uboot:位于drivers/mstar/partition/part_mxp.c::static const int mxp_offset[] = {0xA000/40K/, 0xC000/48K/, 0xF000/60K/, 0x20000/128K/, 0x40000/256K/, 0x80000/512K/}; kernel:位于drivers/sstar/flash_isp/part_mxp.c:static const int mxp_offset[] = {0xA000/40K/, 0xC000/48K/, 0xF000/60K/, 0x20000/128K/, 0x40000/256K/, 0x80000/512K/};
调整分区的方法:
-
改mxp_gen.c生成mxp_sf.bin烧录到MXPT分区。
-
如果ENV分区位置调整,需要对应更改uboot代码include/configs/mercury6.h,把宏CONFIG_ENV_OFFSET做对应修改。
-
可以使用IPLX代替IPL+IPL_CUST,能减少一点flash体积。
如果不烧录分区表,使用bootargs传mtdparts的方式:
kernel config一定要打开CONFIG_MTD_CMDLINE_PARTS,CONFIG_MS_FLASH_ISP_MXP_PARTS可以去掉。如果后者没有去掉,实际上mtdparts也会覆盖掉MXP的分区表。
bootars里的 mtdparts 的名字必须是NOR_FLASH。
比如:
bootargs=mtdparts=NOR_FLASH:320K(boot),2048K(kernel),12544K(program),64K(cliinfo),64K(mtd_runtime),1M(config),-(calibration) root=/dev/mtdblock2 rootfstype=squashfs
9. Busybox 下载和编译¶
说明:公板使用的busybox在project/image/busybox/目录下,make image的时候由脚本解压后打包到文件系统里。也可以自行裁减编译busybox。
9.1. Busybox 下载¶
开源链接:https://busybox.net/downloads/
如果需要公版使用的config,请联系FAE提供。
9.2. 交叉编译Busybox¶
-
declare -x ARCH="arm";declare -x
CROSS_COMPILE="arm-linux-gnueabihf-sigmastar-9.1.0-"
-
make menuconfig
根据需要进行裁剪,原则上:
-
不可以裁剪的选项
Busybox Settings -->
Init Utilities -->
Shells -->
Coreutiles --> -
可裁剪的选项
除上述不可裁剪选项外都可以裁剪,另外Coreutiles -> 中看情况裁剪,留下必须的shell命令。
-
-
make clean;make
-
make install
根目录下的
_install是 busybox 安装包 -
release busybox到project目录,然后重新编译project即可
cd _install tar -zcvf _install.tar.gz ./ cp _install.tar.gz /project/image/busybox/ cd ~/project/image/busybox/ mv _install.tar.gz busybox-1.20.2-arm-linux-gnueabihf-glibc-9.1.0-dynamic.tar.gz
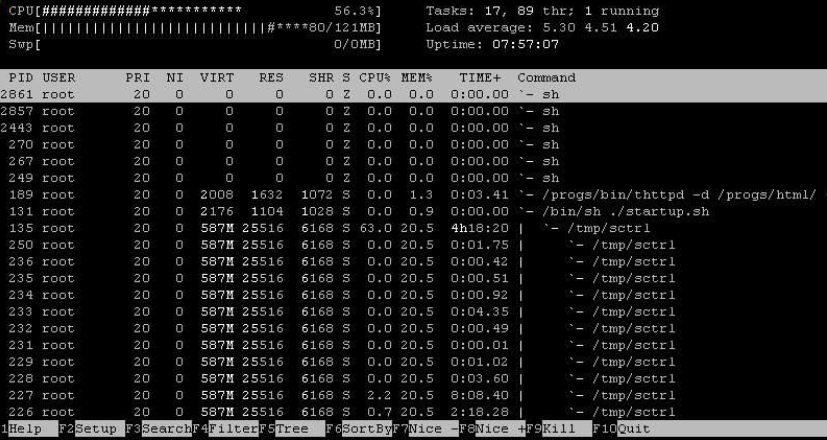
10. htop工具--查看线程占用cpu率¶
利用 telnet 远程登入目标机,输入如下命令
export TERM=vt102 export TERMINFO=/config/terminfo /customer/htop
启动 htop 后,按大写 S, 勾选"Display options"->Tree View 和"Show custom thread names", 再按 Esc 返回。就可以查看不同的线程 cpu 占有率情况。
提示,在代码中要显示线程名字,需要调用api pthread_setname_np来进行设置。
而相应的 htop 程序,位于project/release/chip/m6/ipc/common/glibc/9.1.0/bin/debug目录下, terminfo位于project/release/chip/m6/ipc/common/glibc/9.1.0/bin/config_tool。 SDK 默认出来时,会在/config 下面有 terminfo 的配套文件。如果客户的文件系统里没有,可以把terminfo通过mount上去的方式,再改一下export TERMINFO路径即可。
11. 使用riu_r和riu_w读写寄存器¶
riu_r和riu_w都是16bit width offset。
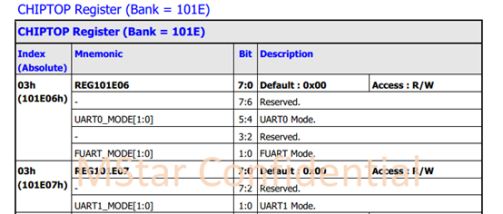
例如写这个寄存器:riu_w 101E 03 FFFF
读这个寄存器:riu_r 101E 03
(需要注意(101E)03才是16bit-width offset,(101E)06/07是8bit-width offset)
内核和uboot对GPIO操作的代码请参考mhal_gpio.c
内核和uboot读写寄存器的代码请参考platform.h
常用的有以下几个:
#define OUTREGMSK8(x, y, z) OUTREG8(x, ((INREG8(x)&~(z))|((y)&(z)))) #define OUTREGMSK16(x, y, z) OUTREG16(x, ((INREG16(x)&~(z))|((y)&(z)))) #define INREG8(x) ms_readb(x) #define OUTREG8(x, y) ms_writeb((u8)(y), x) #define INREG16(x) ms_readw(x) #define OUTREG16(x, y) ms_writew((u16)(y), x) #define ms_readb(a) (*(volatile unsigned char *)IO_ADDRESS(a)) #define ms_readw(a) (*(volatile unsigned short *)IO_ADDRESS(a)) #define ms_writeb(v,a) (*(volatile unsigned char *)IO_ADDRESS(a) = (v)) #define ms_writew(v,a) (*(volatile unsigned short *)IO_ADDRESS(a) = (v))
以上传的是32位内存地址。可根据规格书转换寄存器的内存地址,方法如下:
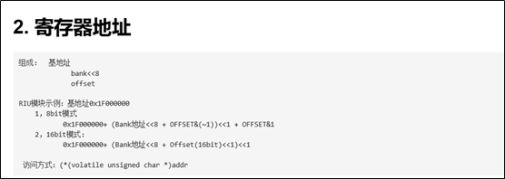
以操作PAD_SAR_GPIO2引脚为例:
-
先从
mhal_gpio.c找到对应的寄存器定义#define GPIO100_PAD PAD_SAR_GPIO2 #define GPIO100_OEN 0x1423, BIT2 #define GPIO100_IN 0x1425, BIT2 #define GPIO100_OUT 0x1424, BIT2
从以上可以看出,output enable对应bank 0x14 地址0x23(8bit)的bit2,写0表示output,写1表示input。
input data 对应bank 0x14地址0x25(8bit)的bit2,output data 对应bank 0x14 地址0x24(8bit)的bit2。
-
从
mhal_gpio.c的MHal_GPIO_Pad_Set()函数里发现,使用PAD_SAR_GPIO2引脚还需要先disable SAR。MHal_SAR_GPIO_WriteRegBit(REG_SAR_MODE,DISABLE,BIT2);—> MHal_SAR_GPIO_REG(REG_SAR_MODE) &= (~BIT2); —>
其中:
#define MHal_SAR_GPIO_REG(addr) (*(volatile U8*)(gSarBaseAddr + (((addr) & ~1)<<1) + (addr & 1))) #define REG_SAR_MODE 0x22 U32 gSarBaseAddr = 0x1F002800;
可以知道,把bank (0x2800>>8)>>1 ,也就是bank 0x14的0x22(8bit)的bit2写0.
-
综合上述:在Uboot里增加代码把PAD_SAR_GPIO2拉高
OUTREGMSK8( 0x1F000000+( (0x14)<<8+0x22&(~1))<<1 + 0x22&(1) , 0 ,1<<2 ); OUTREGMSK8( 0x1F000000+( (0x14)<<8+0x23&(~1))<<1 + 0x23&(1) , 0 , 1<<2); OUTREGMSK8( 0x1F000000+( (0x14)<<8+0x25&(~1))<<1 + 0x25&(1) , 0 , 1<<2); OUTREGMSK8( 0x1F000000+( (0x14)<<8+0x24&(~1))<<1 + 0x24&(1) , 4 ,1<<2 );
把PAD_SPI0_DI拉低或者拉高:
OUTREGMSK8( 0x1F000000+( (0x101E)<<8+0x0F&(~1))<<1 + 0x0F&(1) , 0 ,1<<4 ); OUTREGMSK8( 0x1F000000+( (0x101E)<<8+0x0F&(~1))<<1 + 0x0F&(1) , 0 ,1<<5 ); OUTREGMSK8( 0x1F000000+( (0x103C)<<8+0xE4&(~1))<<1 + 0xE4&(1) , 0 , 1<<5); OUTREGMSK8( 0x1F000000+( (0x103C)<<8+0xE4&(~1))<<1 + 0xE4&(1) , 1<<4, 1<<4);
把PAD_FUART_RTS拉高:
OUTREGMSK8(0x1F20785C,0<<5,1<<5); OUTREGMSK8 (0x1F20785C,0<<4,1<<4); OUTREGMSK8 (0x1F20785C,1<<0,1<<0);//拉高 OUTREGMSK8 (0x1F20785C,0<<0,1<<0);//拉低
12. 读取芯片UUID的方法¶
例程:
#include <fcntl.h> #include <stdio.h> #include <ctype.h> #include <sys/ioctl.h> #include <sys/types.h> #include <stdlib.h> #include <string.h> #define MSYS_IOCTL_MAGIC 'S' #define IOCTL_MSYS_GET_UDID _IO(MSYS_IOCTL_MAGIC, 0x32) typedef struct { unsigned int VerChk_Version; unsigned long long udid; unsigned int VerChk_Size; } __attribute__((__packed__)) MSYS_UDID_INFO; int main(int argc, char* argv[]) { int sysFd = 0; MSYS_UDID_INFO udfo; memset(&udfo,0,sizeof(MSYS_UDID_INFO)); sysFd = open("/dev/msys", O_RDWR); if(sysFd<0){ printf("open /dev/msys fail!\n"); return 0; } udfo.VerChk_Version = 0x4d530100; udfo.VerChk_Size = sizeof(MSYS_UDID_INFO); if(ioctl(sysFd,IOCTL_MSYS_GET_UDID, &udfo)!=0){ printf("ioctl fail!\n"); } printf("The version is 0x%x, The uuid=%lld, the size=%d\n", udfo.VerChk_Version, udfo.udid, udfo.VerChk_Size); close(sysFd); return 0; }
Tiramisu的uuid是烧写在OTP,通过读取bank 101f offset 7c/7d/7e。
riu_r 101f 7c (低16位) riu_r 101f 7d (中16位) riu_r 101f 7e (高16位)
三个16位寄存器值组成48bit UUID。
提供Tiramisu在uboot下读取uuid的代码(比如把以下加在lib/display_iptions.c/dislay_options()):
#include "asm/arch/mach/io.h" #include "asm/arch/mach/ms_types.h" #include "asm/arch/mach/platform.h" unsigned long long udid=0; udid = (u64)INREG16(0x1F203FF0) | ((u64)(INREG16(0x1F203FF4))<<16) | ((u64)(INREG16(0x1F203FF8)) << 32); printf(" uuid=%llx\n",udid);
13. Makefile-中echo -e 显示问题¶
编译SDK生成的image,若根据环境开发搭建用estar命令烧录失败。直接原因是project目录下的Makefile:
echo -e $(foreach n,$(IMAGE_LIST),estar scripts/[[$(n)\\n) >> $(IMAGEDIR)/auto_update.txt
结果在auto_update.txt里把-e也显示出来。
原因:
由于不同的shell(bash和dash)造成的两种不同的结果。
即在bash下正常,在dash下就多显示了一个-e。 从Ubuntu6.10开始,默认使用的shell是dash,dash更快、更高效,可以加快启动速度。
通过查看 ls -l /bin/sh 发现 /bin/sh -> dash。
需要修改ubuntu默认使用bash:sudo dpkg-reconfigure dash
再次查看ls -l /bin.sh 发现/bin/sh -> bash。
14. RNDIS/ECM (网卡)¶
远程网络驱动接口规范(RemoteNDIS),简称RNDIS,是微软基于ECM定义的USB网络协议。
以太网控制模型(Ethernet Networking Control Model),简称ECM,用于在设备和主机之间传输以太网数据包。
14.1. 板端内核配置(device)¶
本节将分别介绍在linux 平台以及uboot 使用rndis的配置方法。
14.1.1. linux 平台配置¶
-> Device Drivers -> USB Gadget Support -> USB Gadget Drivers -> Ethernet Gadget (with CDC Ethernet support) -> [*] RNDIS support
如果选上[*] RNDIS support, 则支持RNDIS虚拟网卡。
生成模块:u_ether.ko usb_f_ecm.ko usb_f_ecm_subset.ko usb_f_rndis.ko g_ether.ko(依赖 libcomposite )
加载顺序:
u_ether.ko usb_f_ecm.ko usb_f_ecm_subset.ko usb_f_rndis.ko udc-msb250x.ko/dwc3.ko g_ether.ko
14.1.2. uboot 平台配置¶
开启配置:
-
CONFIG_CMD_USBSTART
-> Command line interface -> USB commands [*] usbstart
-
SSTAR_UTMI_POWERON
-> Command line interface -> USB commands [*] Power on UTMI first
配置环境变量:
setenv usbnet_devaddr 00:30:78:00:00:02 setenv usbnet_hostaddr 00:50:14:00:00:02 setenv ethact usb_ether setenv ipaddr 10.10.70.3 setenv netmask 255.0.0.0 setenv gatewayip 10.10.70.1 setenv cdc_connect_timeout 20
启动usb device:
usbstart
连上设备可以执行ctrl-c,然后执行ping回到命令行。
14.2. 主机端配置(host)¶
14.2.1. linux 主机¶
x CONFIG_USB_NET_RNDIS_HOST: x x This option enables hosting "Remote NDIS" USB networking links, x as encouraged by Microsoft (instead of CDC Ethernet!) for use in x various devices that may only support this protocol. A variant x of this protocol (with even less public documentation) seems to x be at the root of Microsoft's "ActiveSync" too. x x Avoid using this protocol unless you have no better options. x The protocol specification is incomplete, and is controlled by x (and for) Microsoft; it isn't an "Open" ecosystem or market. x x Symbol: USB_NET_RNDIS_HOST [=m] x Type : tristate x Prompt: Host for RNDIS and ActiveSync devices x Location: x -> Device Drivers x -> Network device support (NETDEVICES [=y]) x -> USB Network Adapters (USB_NET_DRIVERS [=m]) x -> Multi-purpose USB Networking Framework (USB_USBNET [=m]) x Defined at drivers/net/usb/Kconfig:383 x Depends on: NETDEVICES [=y] && USB_NET_DRIVERS [=m] && USB_USBNET [=m] x Selects: USB_NET_CDCETHER [=m] x Selected by: USB_NET_RNDIS_WLAN [=n] && NETDEVICES [=y] && WLAN [=n] && USB [=m] && CFG80211 [=m]
相关驱动:cdc-ether.ko usbusbnet.ko rndis_host.ko
14.2.2. window 主机¶
-
在设备管理器选择需要更新RNDIS驱动的设备
-
右键“更新驱动程序”
-
选择第二项“浏览我的计算机以查找驱动程序软件”
-
选择“从计算机的设备驱动程序选取”
-
选择网络适配器
-
厂商选择:Microsoft, 型号选择远程NDIS 兼容设备
14.3. 网卡使用¶
-
设备端
网卡名usb0(与linux主机端命名方式一致),配置方式:ifconfig usb0 192.168.1.2
-
主机端
跟正常网卡使用方式一致,需与设备端网卡ip网段保持一致
14.4. 动态分配ip¶
可以在连接上host的时候自动给host分配ip
配置对象: device
工具需求: udhcpd
创建leases文件:
mkdir /var/lib/misc/ -p touch /var/lib/misc/udhcpd.leases
创建配置文件:udhcpd.conf
# Sample udhcpd configuration file (/etc/udhcpd.conf) # The start and end of the IP lease block start 192.168.1.20 #default: 192.168.0.20 end 192.168.1.254 #default: 192.168.0.254 # The interface that udhcpd will use interface usb0 #default: eth0 # The maximim number of leases (includes addressesd reserved # by OFFER's, DECLINE's, and ARP conficts #max_leases 254 #default: 254
配置网卡ip:
ifconfig usb0 192.168.1.19
执行命令:
udhcpd -fS /customer/udhcpd.conf &