QUICK START REFERENCE
1. Quick Start Config¶
1.1. Overview¶
This article introduces the config and use of quick start.
1.2. Start Up¶

-
Quick boot skips uboot by default and starts the kernel directly.
-
To enter uboot, long press the enter button and reboot.
-
The post-start process is the execution stage of the profile after the system is running.
1.3. Build¶
-
Find the corresponding ramfs config
./setup_config.sh configs/nvr/i2m/8.2.1/nor.glibc-ramfs.011a.64 -
make image
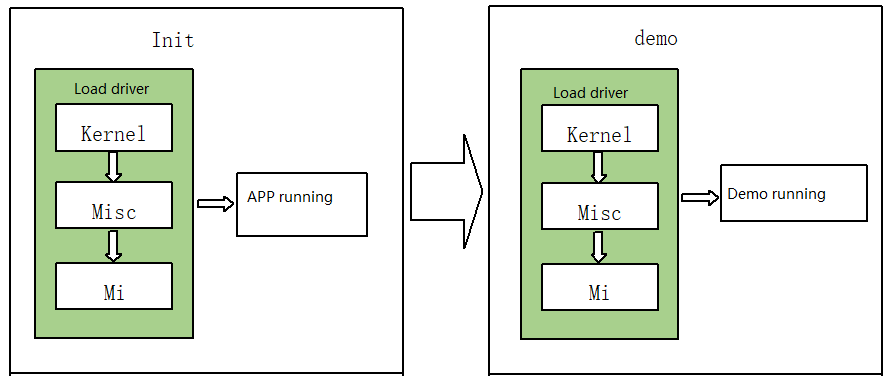
1.4. Post-start Process¶
It includes the mounting of partitions and loading of modules, divided into two stages: init phase and demo phase
-
init parse:(refer to /etc/init.sh)
The necessary environment config of the system:
-
Load the necessary drivers for the system environment config
Load kernel, misc, mi drivers in sequence.
-
Run the app
The demo needs to be run in the background and stored in dram.
-
-
demo parse:(refer to demo.sh)
Perform other operations for the demo running
-
Load the secondary drivers
Load kernel, misc, mi drivers in sequence
-
Run the demo
Demo is stored in flash.
-
1.5. Module Loading Config¶
This section introduces the corresponding config files for module loading , which can be flexibly configured according to requirements.
-
init parse:
-
Feature
The module is stored in the ramfs partition, and it is stored in dram when the system is running (lib/modules/4.9.84).
-
Config file storage directory
The corresponding drive storage directory under project.
-
Config file
Used to configure the drivers loaded in each stage, and add the driver name to the corresponding file.
-
kernel_mod_list:
The kernel driver for system initialization, such as nls_utf8.ko.
-
misc_mod_list:
The misc driver for system initialization, such as mhal.ko.
-
mi_mod_list:
The mi driver for system initialization, such as mi_sys.ko.
-
-
Use of config files
Add the driver name to the corresponding config file.
-
-
demo parse:
-
Feature
The module is stored in the config partition (flash) and do not occupy memory (/config/modules/4.9.84)
-
Config file storage directory
project下相应驱动存放目录The corresponding drive storage directory under project.
-
Config file
Used to configure the drivers loaded in each stage, and add the driver name to the corresponding file.
-
kernel_mod_list_late:
The kernel driver required when the demo is running, such as usb-storage.ko.
-
misc_mod_list_late:
The misc driver required when the demo is running, such as fbdev.ko.
-
mi_mod_list_late:
The mi driver required when the demo is running, such as mi_ai.ko.
-
-
Use of config files
Add the driver name to the corresponding config file.
-
1.6. Dynamic Link Library Storage Partition Config¶
The dynamic link library can be stored in the ramfs partition and the config partition. The ramfs partition occupies the memory, and the config partition is stored in the flash.
-
Stored in ramfs partition
-
Config file name: lib_list_first
-
Config file path:
Dynamic link library directory, such as
release/usbcam/i6/009A-fastboot/glibc/8.2.1/lib/dynamic -
Use
Add the corresponding library name to the config file.
-
-
Stored in config partition
-
Config file name: lib_list_second
-
Config file path:
Dynamic link library directory, such as
release/usbcam/i6/009A-fastboot/glibc/8.2.1/lib/dynamic -
Use
Add the corresponding library name to the config file.
-
1.7. Alkaid And Image Compilation Config¶
-
Alkaid compilation option configuration
-
Config file path: image/configs/, such as
configs/usbcam/i6/nor.glibc-ramfs.009a.64.qfn88 -
Config items:
Config items Description Example CHIP Chip type i6 BOARD Board type 009A-fastboot BOARD_NAME Board name SSC009A-S01A PRODUCT Product type usbcam TOOLCHAIN Compilation tool type glibc TOOLCHAIN_VERSION Compilation tool version 8.2.1 KERNEL_VERSION Linux kernel version 4.9.84 LIBC libc library version libc-2.28 BUSYBOX Specify busybox busybox-1.20.2-arm-linux-gnueabihf-glibc-8.2.1-dynamic IMAGE_CONFIG image config file IMAGE_CONFIG = nor.ramfs.hfglibc.nvr.mma CUSTOMER_OPTIONS Add SDK compilation environment null_options.mk CUSTOMER_TAILOR Enable/Disable the SDK compilation module usbcam_i6_tailor.mk MMAP Linux memory distribution config MMAP_I6_64.h MHAL mhal compilation option i6 IQ0- IQ3 Required Iq file config imx307_iqfile.bin (ipc) EXBOOTARGS Expand bootargs option loglevel=0 kernel$(BOOTENV) bootargs kernel startup config LX_MEM=$(KERNEL_MEMLEN) mma_heap=mma_heap_name0,miu=0,sz=0x2000000 mma_memblock_remove=1 TOOLCHAIN_REL Toolchain prefix arm-linux-gnueabihf- SENSOR_LIST Sensor required for board imx291_MIPI.ko imx307_MIPI.ko sc4236_MIPI.ko SC4238_MIPI.ko SENSOR0 Default sensor imx307_MIPI.ko SENSOR0_OPT Sensor loading parameters chmap=1 FLASH_SIZE Flash size 16M -
-
Image compilation config
-
Config file path: image/configs/
image/configs/i6/nor.ramfs.hfglibc.nvr.mma -
Config items:
Config items Description Example IMAGE_LIST Configure the bin file generated by image ipl uboot kernel rootfs nvrservice customer FLASH_TYPE Flash type nor BOOT_TYPE rootfs type fastboot PAT_TABLE flas interface type spi PHY_TEST Whether to test phy no ipl$(RESOUCE) ipl path $(PROJ_ROOT)/board/$(CHIP)/boot/ipl/fastboot/IPL.bin ipl_cust$(RESOUCE) ipl_cust path $(PROJ_ROOT)/board/$(CHIP)/boot/ipl/fastboot/IPL_CUST.bin uboot$(RESOUCE) uboot path $(PROJ_ROOT)/board/$(CHIP)/boot/$(FLASH_TYPE)/uboot/ u-boot.xz.img.bin kernel$(RESOUCE) kernel Image path $(PROJ_ROOT)/release/$(PRODUCT)/$(CHIP)/$(BOARD)/$(TOOLCHAIN) /$(TOOLCHAIN_VERSION)/bin/kernel/$(FLASH_TYPE)/uImage.mz kernel$(PATSIZE) Kernel partition size 0x200000 kernel$(BOOTENV) Bootargs kernel parameter specification $(KERNEL_BOOT_ENV) loglevel=0 kernel$(BOOTCMD) bootcmd kernel parameter specification sf read $(KERNELBOOTADDR) \$${sf_kernel_start} \$${sf_kernel_size}\; rootfs$(RESOUCE) rootfs output directory $(OUTPUTDIR)/rootfs rootfs$(FSTYPE) File system type used by rootfs ramfs rootfs$(PATSIZE) Partition size occupied by rootfs 0x400000 rootfs$(BOOTENV) bootargs rootfs parameter specification rootfstype=ramfs initrd=$(INITRAMFSLOADADDR),$(rootfs$(PATSIZE)) rootfs$(BOOTCMD) bootcmd rootfs parameter specification mxp r.info rootfs\; sf read $(INITRAMFSLOADADDR) \$${sf_part_start} \$${sf_part_size}\; -
User partition config
Config items Description Example USR_MOUNT_BLOCKS Configure the required user partition (support configuring customers) nvrservice customer nvrservice$(RESOUCE) nvrservice partition directory $(OUTPUTDIR)/tvconfig/config nvrservice$(FSTYPE) nvrservice partition type squashfs nvrservice$(PATSIZE) nvrservice partition size 0x300000 nvrservice$(MOUNTTG) nvrservice partition mount target /config nvrservice$(MOUNTPT) nvrservice partition mount point /dev/mtdblock3 customer$(RESOUCE) customer partition directory $(OUTPUTDIR)/customer customer$(FSTYPE) customer partition type jffs2 customer$(PATSIZE) customer partition size 0x6B0000 customer$(MOUNTTG) customer partition mount target /customer customer$(MOUNTPT) customer partition mount point mtd:customer
-
2. Use Drive And Library¶
2.1. Overview¶
This chapter will introduce the required drivers and the use of some dynamic link libraries according to the required functions.
2.2. Classified By Driver¶
| Classify | Driver | Note |
|---|---|---|
| usb basic driver | usb-comon.ko | usb basic driver |
| usb-core.ko | usb host basic driver | |
| ehci-hcd.ko | usb2.0 host controller driver | |
| xhci-hcd.ko | usb3.0 host controller driver | |
| usb | usb-storage.ko | usb driver (rely on usb basic driver) |
| mouse | mousedev.ko | mouse input driver |
| usbhid.ko | usb mouse(rely on usb basic driver) | |
| network adapter | of_mdio.ko | dependent file |
| kdrv_emac.ko | Network adapter driver at the bottom of the platform | |
| sstar_100_phy.ko | ||
| sunrpc.ko | Remote Procedure Call(RPC) protocol for remote command execution, used by network file system (NFS). | |
| libphy.ko | Network basic drive | |
| fixed_phy.ko | ||
| mtd device | ubi.ko | ubi driver |
| mmc card | mmc_core.ko | mmc basic driver |
| mmc_block.ko | ||
| kdrv_sdmmc.ko | sd card driver | |
| watchdog | mdrv_wdt.ko | watchdog driver |
| Font | nls_utf8.ko | utf8 font driver |
| hard disk drive (HDD) | sd_mod.ko | scsi interface disk support |
| libahci.ko | Serial ata interface related driver | |
| ahci_platform.ko | ||
| libahci_platform.ko | ||
| libata.ko | ||
| mdrv-sata-host.ko | SATA low-level driver | |
| iic | mii.ko | i2c driver |
| File system | grace.ko, nfs.ko | NFS |
| grace.ko, nfsv2.ko | NFS(version2) | |
| ubifs.ko | ubi file system(flash) | |
| jffs2.ko | jffs2 file system(flash) | |
| Squashfs | Squashed read-only file system | |
| fat.ko | fat file system | |
| vfat.ko | vfat file system(USB) | |
| cifs.ko | cifs file system(samba) | |
| ntfs.ko | ntfs file system |
2.3. Classified By Library¶
| Classify | Library | Note |
|---|---|---|
| toolchain related library | librt-2.28.so | Real-time expansion library, including semaphore, synchronous io, etc. |
| libm-2.28.so | Mathematics related library | |
| ld-2.28.so | Link library | |
| libresolv-2.28.so | Provide network domain name package analysis related functions | |
| libdl-2.28.so | Loading dynamics | |
| libstdc++.so | Standard library | |
| libc-2.28.so | ||
| libpcprofile.so | ||
| libpthread-2.28.so | Thread related library | |
| MI related | libmi_common.so | mi basic library |
| libmi_sys.so | mi basic library, responsible for building the basic mi framework and providing buf management | |
| libmi_sensor.so | sensor related library | |
| libmi_vif.so | vif related library | |
| libmi_vpe.so | vpe related library | |
| libmi_venc.so | Provide video decoding function | |
| libmi_rgn.so | Provide drawing function | |
| libmi_disp.so | Provide video splicing, video output, connect panel, hdmi and other functions. | |
| libmi_vdec.so | Provide video decoding function | |
| libmi_vdf.so | Provide video algorithm functions, including movement monitoring, occlusion detection, virtual fence, etc. | |
| libmi_shadow.so | Provide vdf connection interface | |
| libmi_iqserver.so | Provide network debugging iq function, connect isp module | |
| libmi_ldc.so | Provide fisheye lens restoration support | |
| libmi_ive.so | Provide the use of hardware operators | |
| libmi_isp.so | Provide advanced image debugging interface | |
| libmi_ai.so | audio input related library | |
| libmi_ao.so | audio output related library | |
| libmi_gfx.so | Provide data migration function | |
| libmi_hdmi.so | hdmi related library | |
| libmi_panel.so | panel related library | |
| libmi_fb.so | Provide fb device support | |
| libmi_cipher.so | Provide data encryption and decryption functions | |
| others | libcus3a.so | Provide ISP advanced functions, such as auto focus |
| libMD_LINUX.so | vdf related library, provide mobile monitoring function | |
| libOD_LINUX.so | vdf related library, provide occlusion detection function | |
| libVG_LINUX.so | vdf related library, provide virtual fence function | |
| libAEC_LINUX.so | audio algorithm library, providing aec function | |
| libAED_LINUX.so | audio algorithm library, providing babycry detection and high decibel detection | |
| libAPC_LINUX.so | audio algorithm library, providing noise reduction, equalization, automatic gain control, and high-pass filtering | |
| libSRC_LINUX.so | audio algorithm library, providing resampling function | |
| libg711.so | audio algorithm library, providing g711 encoding and decoding | |
| libg726.so | audio algorithm library, providing g726 encoding and decoding |
Note: Toolchain related libraries are necessary. The mi libraries can be loaded as needed, and the others can be loaded according to the needs of the corresponding mi modules.