MI IVE API
1. API 参考¶
1.1. 功能模块API¶
该功能提供以下API:
| API名 | 功能 |
|---|---|
| MI_IVE_Create | 建立IVE handle |
| MI_IVE_Destroy | 释放IVE handle |
| MI_IVE_Filter | 执行 5x5 模板滤波任务 |
| MI_IVE_Csc | 执行色彩空间转换任务 |
| MI_IVE_FilterAndCsc | 执行模板滤波加色彩空间转换复合任务 |
| MI_IVE_Sobel | 执行 5x5 模板 Sobel-like 梯度计算任务。 |
| MI_IVE_MagAndAng | 执行 5x5 模板计算梯度幅值与幅角任务。 |
| MI_IVE_Dilate | 执行膨胀任务 |
| MI_IVE_Erode | 执行腐蚀任务。 |
| MI_IVE_Thresh | 执行图像二值化任务。 |
| MI_IVE_And | 执行两图像相与任务 |
| MI_IVE_Sub | 执行两图像相减任务。 |
| MI_IVE_Or | 执行两图像相或任务 |
| MI_IVE_Integ | 执行积分图统计任务。 |
| MI_IVE_Hist | 执行直方图统计任务。 |
| MI_IVE_ThreshS16 | 执行 S16 数据到 8bit 数据阈值化任务 |
| MI_IVE_ThreshU16 | 执行 U16 数据到 U8 数据阈值化任务。 |
| MI_IVE_16BitTo8Bit | 执行 16bit 数据到 8bit 数据线性转化任务。 |
| MI_IVE_OrdStatFilter | 执行 3x3 模板顺序统计量滤波任务 |
| MI_IVE_Map | 执行Map(映射 U8->U8 赋值)任务。 |
| MI_IVE_EqualizeHist | 执行灰度图像的直方图均衡化计算任务 |
| MI_IVE_Add | 执行两灰度图像的加权加计算任务 |
| MI_IVE_Xor | 执行两二值图的异或计算任务 |
| MI_IVE_Ncc | 执行两相同分辨率图像的归一化互相关系数计算任务 |
| MI_IVE_Ccl | 执行二值图像的连通区域标记任务 |
| MI_IVE_Gmm | 执行 GMM 背景建模任务 |
| MI_IVE_CannyHysEdge | 执行灰度图的 Canny 强弱边缘提取任务 |
| MI_IVE_CannyEdge | 灰度图的 Canny 边缘提取的后半部:连接边缘点,形成Canny 边缘图。 |
| MI_IVE_Lbp | 执行LBP 计算任务。 |
| MI_IVE_NormGrad | 执行归一化梯度计算任务,梯度均分量均归一化到 S8 |
| MI_IVE_LkOpticalFlow | 执行单层 LK 光流计算任务。 |
| MI_IVE_Sad | 计算两幅图像按 4x4\8x8\16x16 分块的 16 bit\8 bit SAD 图像, 以及对 SAD 进行阈值化输出。 |
| MI_IVE_Bernsen | 执行 3x3 和 5x5 模板的Bernsen门坎值任务。 |
| MI_IVE_LineFilterHor | 针对二位图像进行水平方向的滤波任务 |
| MI_IVE_LineFilterVer | 针对二位图像进行垂直方向的滤波任务 |
| MI_IVE_NoiseRemoveHor | 针对二位图像进行水平方向之噪声滤除任务。 |
| MI_IVE_NoiseRemoveVer | 针对二位图像进行垂直方向之噪声滤除任务。 |
| MI_IVE_AdpThresh | 执行使用自适应性门坎值的二值化任务。 |
| MI_IVE_Resize | 执行缩放影像任务。 |
| MI_IVE_BAT | 针对二位图像执行水平和垂直方向的数值交替次数计算任务。 |
| MI_IVE_Acc | 执行两灰度图像的累积运算任务。 |
| MI_IVE_Matrix_Transform | 执行矩阵运算任务。 |
| MI_IVE_Image_Dot | 执行图像点乘积任务。 |
| MI_IVE_Shift_Detector | 执行图像区域追踪任务。 |
| MI_IVE_AlphaBlending | 执行图像个别权重乘积任务。 |
1.2. MI_IVE_Create¶
-
功能
建立IVE handle
-
语法
MI_IVE_HANDLE MI_IVE_Create(MI_IVE_HANDLE hHandle); -
形参
参数名称 描述 输入/输出 hHandle 区域句柄号。
必须是未使用的hHandle 号
取值范围:[0, MI_IVE_HANDLE_MAX)输入 -
返回值
返回值 描述 0 成功。 非 0 失败,参见错误码。 -
依赖
-
头文件:mi_comm_ive.h、mi_ive.h、mi_ive.h
-
库文件:libive.a
-
1.3. MI_IVE_Destroy¶
-
功能
释放IVE handle
-
语法
MI_IVE_HANDLE MI_IVE_Destroy(MI_IVE_HANDLE hHandle); -
形参
参数名称 描述 输入/输出 hHandle 区域句柄号。
取值范围:[0, MI_IVE_HANDLE_MAX)。输入 -
返回值
返回值 描述 0 成功。 非 0 失败,参见错误码。 -
依赖
-
头文件:mi_comm_ive.h、mi_ive.h、mi_ive.h
-
库文件:libive.a
-
1.4. MI_IVE_Filter¶
-
功能
执行 5x5 模板滤波任务,通过配置不同的模板系数,可以实现不同的滤波。
-
语法
MI_S32 MI_IVE_Filter( MI_IVE_HANDLE hHandle, MI_IVE_SrcImage_t *pstSrc, MI_IVE_DstImage_t *pstDst, MI_IVE_FilterCtrl_t *pstFltCtrl, MI_BOOL bInstant);
-
形参
参数名称 描述 输入/输出 hHandle 区域句柄号。
取值范围:[0, MI_IVE_HANDLE_MAX)。输入 pstSrc 源图像指针。不能为空。 输入 pstDst 输出图像指针。不能为空。
高、宽同 pstSrc。输出 pstFltCtrl 控制信息指针。不能为空。 输入 bInstant 保留 输入 参数名称 支持图像类型 地址对齐 分辨率 pstSrc U8C1、YUV420SP、YUV422SP 16 byte 64x64~1920x1024 pstDst 同 pstSrc 16 byte 同 pstSrc 注:U8C1\YUV420SP\YUV422SP 均为MI_IVE_ImageType_e 成员的简写,后续其他的成员在表述中也用相同的规则简写。
-
返回值
返回值 描述 0 成功。 非 0 失败,参见错误码。 -
依赖
-
头文件:mi_comm_ive.h、mi_ive.h、mi_ive.h
-
库文件:libive.a
-
-
注意
-
当源数据为 YUV420SP、YUV422SP 类型时,要求输出数据跨度一致。
-
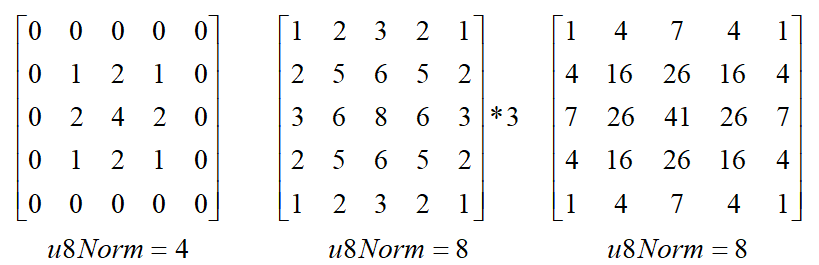
Filter 计算公式示意如下所示。
 I_{out}(x,y)={\sum_{-2\leqslant i\leqslant2} \sum_{-2\leqslant j\leqslant2} I_{in}(x+i,y+j)*coef(x+i,y+j)}>>norm
I_{out}(x,y)={\sum_{-2\leqslant i\leqslant2} \sum_{-2\leqslant j\leqslant2} I_{in}(x+i,y+j)*coef(x+i,y+j)}>>norm图1-1 Filter 计算公式示意图
其中,I(x,y)对应pstSrc,Iout(x,y)对应 pstDst,coef (mask)对应 pstFltCtrl 中的as8Mask[MI_IVE_MASK_SIZE_5X5],norm对应pstFltCtrl中的u8Norm。
-
经典高斯模板如下。
MI_IVE_Data_t 二维数据跨度,表示二维数据一行的字节数,即为下图中 n=8的情况。
可以将 MI_IVE_Data_t 看成一个“像素”用 8bit 表示的图像,那么跨度即统一表述为图像或二维数据的一行以“像素”计算的单元个数。
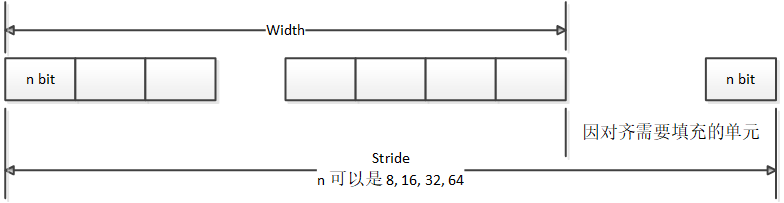
图1-2 跨度(stride)示意图
-
对齐
硬件为了快速访问内存首地址或者跨行访问数据,要求内存地址或内存跨度必须为对齐系数的倍数。
-
数据内存首地址对齐
当前 IVE 算子对其输入输出有要求 1byte 对齐、2byte 对齐以及 16byte 对齐的,具体见各算子 API 参考中的参数要求。
-
跨度对齐
对于二维广义图像、二维单分量数据以及一维数组数据的跨度均必须满足 16“像素”对齐。
-
-
输入、输出数据类型(具体结构定义请参见数据类型章节)
-
二维广义图像数据
MI_IVE_Image_t、MI_IVE_SrcImage_t 、MI_IVE_DstImage_t ,图像的类型参考。
注意:当前所有算子输入输出的二维广义图像数据的高宽均需为偶数。
-
二维单分量数据
MI_IVE_Data_t,以 byte 为单位的二维数据,主要用于 DMA 等,MI_IVE_Image_t 根据类型 可以转化为单个或多个MI_IVE_Data_t 。
-
一维数据
MI_IVE_MemInfo_t、MI_IVE_SrcMemInfo_t、MI_IVE_DstMemInfo_t,表示一维数据,如 Hist 的统计数据、GMM 的模型数据、LKOpticalFlow 的角点输入等。
-
二维广义图像类型
类型 图像描述 内存地址 跨度 E_MI_IVE_Image_tYPE_U8C1 8bit 无符号单通道图像 仅用到 MI_IVE_Image_t 中的u32PhyAddr[0]、pu8VirAddr[0] 仅用到u16Stride[0]
-
-
-
相关主题
1.5. MI_IVE_Csc¶
-
功能
执行YUV2RGB\YUV2BGR\RGB2YUV\BGR2YUV 等模式的色彩空间转换。
-
语法
MI_S32 MI_IVE_Csc(MI_IVE_HANDLE hHandle, MI_IVE_SrcImage_t *pstSrc, MI_IVE_DstImage_t *pstDst, MI_IVE_CscCtrl_t *pstCscCtrl, MI_BOOL bInstant); -
形参
参数名称 描述 输入/输出 hHandle 区域句柄号。
取值范围:[0, MI_IVE_HANDLE_MAX)。输入 pstSrc 源图像指针。不能为空。 输入 pstDst 输出图像指针。不能为空。
高、宽同 pstSrc。输出 pstCscCtrl 控制信息指针。不能为空。 输入 bInstant 保留。 输入 参数名称 支持图像类型 地址对齐 分辨率 pstSrc YUV420SP、YUV422SP、U8C3_PLANAR、U8C3_PACKAGE 16 byte 64x64~1920x1080 pstDst U8C3_PLANAR、U8C3_PACKAGE、YUV420SP、YUV422SP 16 byte 同 pstSrc -
返回值
返回值 描述 0 成功。 非 0 失败,参见错误码。 -
依赖
-
头文件:mi_comm_ive.h、mi_ive.h、mi_ive.h
-
库文件:libive.a
-
-
注意
-
当输出数据为 U8C3_PLANAR、YUV420SP、YUV422SP 类型时,要求输出数据跨度一致。
-
不同的模式其输出的取值范围不一样,具体请参见 MI_IVE_CscMode_e。 转换公式如下:
\begin{bmatrix} &Y \\ &U \\ &V \\ \end{bmatrix} = \begin{bmatrix} &0.299 &0.587 &0.114 \\ &-0.169 &-0.331 &0.5 \\ &0.5 &-0.419 &-0.081 \\ \end{bmatrix} \begin{bmatrix} &R \\ &G \\ &B \\ \end{bmatrix} + \begin{bmatrix} &0 \\ &128 \\ &128 \\ \end{bmatrix}\begin{bmatrix} &R \\ &G \\ &B \\ \end{bmatrix} = \begin{bmatrix} &1 &-0.00093 &1.401687 \\ &1 &-0.3437 &-0.71417 \\ &1 &1.77216 &0.00099 \\ \end{bmatrix} \begin{bmatrix} &Y \\ &U-128 \\ &V-128 \\ \end{bmatrix}
-
-
相关主题
1.6. MI_IVE_FilterAndCsc¶
-
功能
执行 5x5 模板滤波和 YUV2RGB 色彩空间转换复合任务,通过一次执行完成两种功能。
-
语法
MI_S32 MI_IVE_FilterAndCsc(MI_IVE_HANDLE hHandle, MI_IVE_SrcImage_t *pstSrc, MI_IVE_DstImage_t *pstDst, MI_IVE_FilterAndCscCtrl_t *pstFltCscCtrl, MI_BOOL bInstant); -
形参
参数名称 描述 输入/输出 hHandle 区域句柄号。 取值范围:[0, MI_IVE_HANDLE_MAX)。 输入 pstSrc 源图像指针。不能为空。 输入 pstDst 输图像据指针。不能为空。高、宽同 pstSrc。 输出 pstFltCscCtrl 控制信息指针。不能为空。 输入 bInstant 保留。 输入 参数名称 支持图像类型 地址对齐 分辨率 pstSrc YUV420SP、YUV422SP 16 byte 64x64~1920x1024 pstDst U8C3_PLANAR、U8C3_PACKAGE 16 byte 同 pstSrc -
返回值
返回值 描述 0 成功。 非 0 失败,参见错误码。 -
依赖
-
头文件:mi_comm_ive.h、mi_ive.h、mi_ive.h
-
库文件:libive.a
-
-
注意
当输出数据为 U8C3_PLANAR 类型时,要求输出数据跨度一致。
仅支持 YUV2RGB 的 4 种工作模式,具体参见MI_IVE_CscMode_e 。
-
相关主题
1.7. MI_IVE_Sobel¶
-
功能
执行 5x5 模板 Sobel-like 梯度计算任务。
-
语法
MI_S32 MI_IVE_Sobel(MI_IVE_HANDLE hHandle, MI_IVE_SrcImage_t *pstSrc, MI_IVE_DstImage_t *pstDstH, MI_IVE_DstImage_t *pstDstV, MI_IVE_SobelCtrl_t *pstSobelCtrl, MI_BOOL bInstant); -
形参
参数名称 描述 输入/输出 hHandle 区域句柄号。取值范围:[0, MI_IVE_HANDLE_MAX) 输入 pstSrc 源图像指针。不能为空。根据 pstSobelCtrl→eOutCtrl,若需要输出则不能为空。高、宽同 pstSrc。 输入 pstDstH 由模板直接滤波得到的梯度分量图像 H 指针。 输出 pstDstV 由转置后的模板滤波得到的梯度分量图像 V 指针。根据pstSobelCtrl→eOutCtrl,若需要输出则不能为空。高、宽同 pstSrc。 输出 pstSobelCtrl 控制信息指针。不能为空。 输入 bInstant 保留。 输入 参数名称 支持图像类型 地址对齐 分辨率 pstSrc U8C1 16 byte 64x64~1920x1024 pstDstH S16C1 16 byte 同 pstSrc pstDstV S16C1 16 byte 同 pstSrc -
返回值
返回值 描述 0 成功。 非 0 失败,参见错误码。 -
依赖
-
头文件:mi_comm_ive.h、mi_ive.h、mi_ive.h
-
库文件:libive.a
-
-
注意
可配置 3 种输出模式,参考 MI_IVE_SobelOutCtrl_e。
当输出模式为 E_MI_IVE_SOBEL_OUT_CTRL_BOTH 时,要求 pstDstH 和 pstDstV 跨度一致。
Sobel 计算公式示意如下图所示。

图1-3 Sobel 计算公式示意图
H_{out}(x,y)=\sum_{-2\leqslant i\leqslant2}\sum_{-2\leqslant j\leqslant2}I(x+i,y+j)*coef(x+i,y+j)V_{out}(x,y)=\sum_{-2\leqslant i\leqslant2}\sum_{-2\leqslant j\leqslant2}I(x+i,y+j)*coef(x+i,y+j)其中, I (x, y) 对应 pstSrc, Hout(x, y) 对应 pstDstH,Vout(x, y) 对应 pstDstV,coef (mask)为 pstSobelCtrl 中的as8Mask[MI_IVE_MASK_SIZE_5X5]
-
Sobel 模板
\begin{bmatrix} &0 &0 &0 &0 &0 \\ &0 &-1 &0 &1 &0 \\ &0 &-2 &0 &2 &0 \\ &0 &-1 &0 &1 &0 \\ &0 &0 &0 &0 &0 \end{bmatrix} \begin{bmatrix} &0 &0 &0 &0 &0 \\ &0 &-1 &-2 &-1 &0 \\ &0 &0 &0 &0 &0 \\ &0 &1 &2 &1 &0 \\ &0 &0 &0 &0 &0 \end{bmatrix}\begin{bmatrix} &-1 &-2 &0 &2 &1 \\ &-4 &-8 &0 &8 &4 \\ &-6 &-12 &0 &12 &6 \\ &-4 &-8 &0 &8 &4 \\ &-1 &-2 &0 &2 &1 \end{bmatrix} \begin{bmatrix} &-1 &-4 &-6 &-4 &-1 \\ &-2 &-8 &-12 &-8 &-2 \\ &0 &0 &0 &0 &0 \\ &2 &8 &12 &8 &2 \\ &1 &4 &6 &4 &1 \end{bmatrix} -
Scharr 模板
\begin{bmatrix} &0 &0 &0 &0 &0 \\ &0 &-3 &0 &3 &0 \\ &0 &-10 &0 &10 &0 \\ &0 &-3 &0 &3 &0 \\ &0 &0 &0 &0 &0 \end{bmatrix} \begin{bmatrix} &0 &0 &0 &0 &0 \\ &0 &-3 &-10 &-3 &0 \\ &0 &0 &0 &0 &0 \\ &0 &3 &10 &3 &0 \\ &0 &0 &0 &0 &0 \end{bmatrix} -
拉普拉斯模板
\begin{bmatrix} &0 &0 &0 &0 &0 \\ &0 &0 &1 &0 &0 \\ &0 &1 &-4 &1 &0 \\ &0 &0 &1 &0 &0 \\ &0 &0 &0 &0 &0 \end{bmatrix} \begin{bmatrix} &0 &0 &0 &0 &0 \\ &0 &0 &-1 &0 &0 \\ &0 &-1 &4 &-1 &0 \\ &0 &0 &-1 &0 &0 \\ &0 &0 &0 &0 &0 \end{bmatrix}\begin{bmatrix} &0 &0 &0 &0 &0 \\ &0 &1 &1 &1 &0 \\ &0 &1 &-8 &1 &0 \\ &0 &1 &1 &1 &0 \\ &0 &0 &0 &0 &0 \end{bmatrix} \begin{bmatrix} &0 &0 &0 &0 &0 \\ &0 &-1 &-1 &-1 &0 \\ &0 &-1 &8 &-1 &0 \\ &0 &-1 &-1 &-1 &0 \\ &0 &0 &0 &0 &0 \end{bmatrix}
-
-
相关主题
1.8. MI_IVE_MagAndAng¶
-
功能
执行 5x5 模板梯度幅值与幅角计算任务。
-
语法
MI_S32 MI_IVE_MagAndAng(MI_IVE_HANDLE hHandle, MI_IVE_SrcImage_t *pstSrc, MI_IVE_DstImage_t *pstDstMag, MI_IVE_DstImage_t *pstDstAng, MI_IVE_MagAndAngCtrl_t*pstMagAndAngCtrl, MI_BOOL bInstant); -
形参
参数名称 描述 输入/输出 hHandle 区域句柄号。
取值范围:[0, MI_IVE_HANDLE_MAX)。输入 pstSrc 源图像指针。不能为空。 输入 pstDstMag 输出幅值图像指针。不能为空。
高、宽同 pstSrc。输出 pstDstAng 输出幅角图像指针。
根据 pstMagAndAngCtrl→eOutCtrl,需要输出则不能为空。输出 pstMagAndAngCtrl 控制信息指针。不能为空。
高、宽同 pstSrc。输入 bInstant 保留。 输入 参数名称 支持图像类型 地址对齐 分辨率 pstSrc U8C1 16 byte 64x64~1920x1024 pstDstMag U16C1 16 byte 同 pstSrc pstDstAng U8C1 16 byte 同 pstSrc -
返回值
返回值 描述 0 成功。 非 0 失败,参见错误码。 -
依赖
-
头文件:mi_comm_ive.h、mi_ive.h、mi_ive.h
-
库文件:libive.a
-
-
注意
-
可配置 2 种输出模式,具体参见 MI_IVE_MagAndAngOutCtrl_e。
-
当输出模式为 E_MI_IVE_MAG_AND_ANG_OUT_CTRL_MAG_AND_ANG 时,要求pstDstMag和 pstDstAng跨度一致。
-
用户可以通过pstMagAndAngCtrl→u16Thr对幅值图进行thresh 操作(可以用来实现 EOH),计算公式如下:
Mag(x,y)=\left\{ \begin{aligned} 0 , Mag(x,y) < u16Thr \\ Mag(x,y) ,Mag(x,y)\geq u16Thr \end{aligned} \right.其中, Mag(x, y) 对应 pstDstMag。

图1-4 MagAndAng 计算示意图
H_{out}(x,y)=\sum_{-2\leqslant i\leqslant2}\sum_{-2\leqslant j\leqslant2}I(x+i,y+j)*coef(x+i,y+j)V_{out}(x,y)=\sum_{-2\leqslant i\leqslant2}\sum_{-2\leqslant j\leqslant2}I(x+i,y+j)*coef(x+i,y+j)Mag(x,y)=abs(H_{out}(x,y))+abs(V_{out}(x,y))
θ(x,y)根据Hout(x,y)、Vout(x,y)以及arctan(Vout/Hout)取对应上图中0~7的方向值。
其中,I(x,y)对应pstSrc,Mag(x,y)对应pstDstMag,θ(x,y)对应pstDstAng,coef(mask)为pstMagAndAngCtrl中的as8Mask[MI_IVE_MASK_SIZE_5X5]。
-
-
相关主题
1.9. MI_IVE_Dilate¶
-
功能
执行二值图像 5x5 模板膨胀任务。
-
语法
MI_S32 MI_IVE_Dilate(MI_IVE_HANDLE hHandle, MI_IVE_SrcImage_t *pstSrc, MI_IVE_DstImage_t *pstDst, MI_IVE_DilateCtrl_t *pstDilateCtrl, MI_BOOL bInstant); -
形参
参数名称 描述 输入/输出 hHandle 区域句柄号。br<> 取值范围:[0, MI_IVE_HANDLE_MAX)。 输入 pstSrc 源图像指针。不能为空。 输入 pstDst 输出图像指针。不能为空。
高、宽同 pstSrc。输出 pstDilateCtrl 控制信息指针。 输入 bInstant 保留。 输入 参数名称 支持图像类型 地址对齐 分辨率 pstSrc U8C1 的二值图 16 byte 64x64~1920x1024 pstDst U8C1 的二值图 16 byte 同 pstSrc -
返回值
返回值 描述 0 成功。 非 0 失败,参见错误码。 -
依赖
-
头文件:mi_comm_ive.h、mi_ive.h、mi_ive.h
-
库文件:libive.a
-
-
注意
-
模板系数只能为 0 或 255。
-
模板样例
\begin{bmatrix} &0 &0 &0 &0 &0 \\ &0 &0 &255 &0 &0 \\ &0 &255 &255 &255 &0 \\ &0 &0 &255 &0 &0 \\ &0 &0 &0 &0 &0 \end{bmatrix} \begin{bmatrix} &0 &0 &0 &0 &0 \\ &0 &255 &255 &255 &0 \\ &0 &255 &255 &255 &0 \\ &0 &255 &255 &255 &0 \\ &0 &0 &0 &0 &0 \end{bmatrix}\begin{bmatrix} &0 &255 &255 &255 &0 \\ &255 &255 &255 &255 &255 \\ &255 &255 &255 &255 &255 \\ &255 &255 &255 &255 &255 \\ &0 &255 &255 &255 &0 \end{bmatrix} \begin{bmatrix} &255 &255 &255 &255 &255 \\ &255 &255 &255 &255 &255 \\ &255 &255 &255 &255 &255 \\ &255 &255 &255 &255 &255 \\ &255 &255 &255 &255 &255 \end{bmatrix}
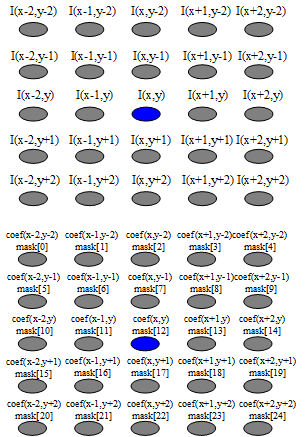
图1-5 Dilate 计算公式示意图
I_{out}(x,y)=O_{-2\leqslant i\leqslant2}(O_{-2\leqslant j\leqslant2}(f(i,j)))其中
f(i,j)=I(x-i,y-j)\&coef(x-i,y-j)O_{-2\leqslant i\leqslant 2}=g(-2)|g(-1)|g(0)|g(1)|g(2)其中,公式中|为位或运算,&为位与运算,%为取余运算。I(x,y)对应pstSrc,Iout (x,y)对应pstDst,coef(mask)对应pstDilateCtrl中的au8Mask[MI_IVE_MASK_SIZE_5X5]。
-
-
相关主题
1.10. MI_IVE_Erode¶
-
功能
执行二值图像 5x5 模板腐蚀任务。
-
语法
MI_S32 MI_IVE_Erode(MI_IVE_HANDLE hHandle, MI_IVE_SrcImage_t *pstSrc, MI_IVE_DstImage_t *pstDst, MI_IVE_ErodeCtrl_t *pstErodeCtrl,MI_BOOL bInstant); -
形参
参数名称 描述 输入/输出 hHandle 区域句柄号。
取值范围:[0, MI_IVE_HANDLE_MAX)。输入 pstSrc 源图像指针。不能为空。 输入 pstDst 输出图像指针。不能为空。
高、宽同 pstSrc.输出 pstErodeCtrl 控制信息指针。不能为空。 输入 bInstant 保留。 输入 参数名称 支持图像类型 地址对齐 分辨率 pstSrc U8C1 的二值图 16 byte 64x64~1920x1024 pstDst U8C1 的二值图 16 byte 同 pstSrc -
返回值
返回值 描述 0 成功。 非 0 失败,参见错误码。 -
依赖
-
头文件:mi_comm_ive.h、mi_ive.h、mi_ive.h
-
库文件:libive.a
-
-
注意
模板系数只能为 0 或 255。
模板样例
\begin{bmatrix} &0 &0 &0 &0 &0 \\ &0 &0 &255 &0 &0 \\ &0 &255 &255 &255 &0 \\ &0 &0 &255 &0 &0 \\ &0 &0 &0 &0 &0 \end{bmatrix} \begin{bmatrix} &0 &0 &0 &0 &0 \\ &0 &255 &255 &255 &0 \\ &0 &255 &255 &255 &0 \\ &0 &255 &255 &255 &0 \\ &0 &0 &0 &0 &0 \end{bmatrix}\begin{bmatrix} &0 &255 &255 &255 &0 \\ &255 &255 &255 &255 &255 \\ &255 &255 &255 &255 &255 \\ &255 &255 &255 &255 &255 \\ &0 &255 &255 &255 &0 \end{bmatrix} \begin{bmatrix} &255 &255 &255 &255 &255 \\ &255 &255 &255 &255 &255 \\ &255 &255 &255 &255 &255 \\ &255 &255 &255 &255 &255 \\ &255 &255 &255 &255 &255 \end{bmatrix}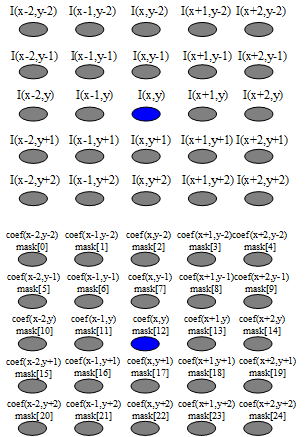
图1-6 Erode 计算公式示意图
I_{out}(x,y)=O_{-2\leqslant i\leqslant2}(O_{-2\leqslant i\leqslant2}(f(i,j)))其中,
f(i,j)=I(x-i,y-j)|(255-coef(x-i,y-j))O_{-2\leqslant i\leqslant2}(g(k))=g(-2)\&g(-1)\&g(0)\&g(1)\&g(2)其中,公式中|为位或运算,&为位与运算,%为取余运算。 I (x, y) 对应 pstSrc,Iout (x, y) 对应 pstDst, coef (mask)对应 pstErodeCtrl 中的 au8Mask[MI_IVE_MASK_SIZE_5X5]。
-
相关主题
1.11. MI_IVE_Thresh¶
-
功能
执行灰度图像阈值化任务。
-
语法
MI_S32 MI_IVE_Thresh(MI_IVE_HANDLE hHandle, MI_IVE_SrcImage_t *pstSrc, MI_IVE_DstImage_t *pstDst, MI_IVE_ThreshCtrl_t *pstThrCtrl, MI_BOOL bInstant); -
形参
参数名称 描述 输入/输出 hHandle 区域句柄号。
取值范围:[0, MI_IVE_HANDLE_MAX)。输入 pstSrc 源图像指针。不能为空。 输入 pstDst 输出图像指针。不能为空。
高、宽同 pstSrc。输出 pstThrCtrl 控制信息指针。 输入 bInstant 保留。 输入 参数名称 支持图像类型 地址对齐 分辨率 pstSrc U8C1 1 byte 64x64~1920x1080 pstDst U8C1 1 byte 同 pstSrc -
返回值
返回值 描述 0 成功。 非 0 失败,参见错误码。 -
依赖
-
头文件:mi_comm_ive.h、mi_ive.h、mi_ive.h
-
库文件:libive.a
-
-
注意
可以配置 8 种运算模式,具体参见MI_IVE_ThreshMode_e 。
计算公式
E_MI_IVE_THRESH_MODE_BINARY:
I_{out}(x,y)=\left\{ \begin{aligned} minVal I(x,y)\leqslant lowThr \\ maxVal I(x,y)> lowThr \end{aligned} \right.midVal 、highThr 无需赋值。
E_MI_IVE_THRESH_MODE_TRUNC:
I_{out}(x,y)=\left\{ \begin{aligned} I(x,y),I(x,y)\leqslant lowThr \\ maxVal,I(x,y)>lowThr \end{aligned} \right.minVal 、midVal 、highThr 无需赋值。
E_MI_IVE_THRESH_MODE_TO_MINVAL:
I_{out}(x,y)=\left\{ \begin{aligned} minVal,I(x,y)\leqslant lowThr \\ I(x,y),I(x,y)> lowThr \end{aligned} \right.midVal 、maxVal 、highThr 无需赋值。
E_MI_IVE_THRESH_MODE_MIN_MID_MAX:
I_{out}(x,y)=\left\{ \begin{aligned} minVal,I(x,y)\leqslant lowThr \\ midVal,lowThr\leqslant I(x,y)\leqslant highThr \\ maxVal,I(x,y)>highThr \end{aligned} \right.E_MI_IVE_THRESH_MODE_ORI_MID_MAX:
I_{out}(x,y)=\left\{ \begin{aligned} I(x,y),I(x,y)\leqslant lowThr \\ midVal,lowThr\leqslant I(x,y)\leqslant highThr \\ maxVal,I(x,y)>highThr \end{aligned} \right.minVal 无需赋值。
E_MI_IVE_THRESH_MODE_MIN_MID_ORI:
I_{out}(x,y)=\left\{ \begin{aligned} minVal,I(x,y) \leqslant lowThr \\ midVal,lowThr\leqslant I(x,y)\leqslant highThr \\ I(x,y),I(x,y)>highThr \end{aligned} \right.maxVal 无需赋值。
E_MI_IVE_THRESH_MODE_MIN_ORI_MAX:
I_{out}(x,y)=\left\{ \begin{aligned} minVal,I(x,y) \leqslant lowThr \\ I(x,y),lowThr\leqslant I(x,y)\leqslant highThr \\ maxVal,I(x,y)>highThr \end{aligned} \right.midVal 无需赋值。
E_MI_IVE_THRESH_MODE_ORI_MID_ORI:
I_{out}(x,y)=\left\{ \begin{aligned} I(x,y),I(x,y) \leqslant lowThr \\ midVal,lowThr\leqslant I(x,y)\leqslant highThr \\ I(x,y),I(x,y)>highThr \end{aligned} \right.minVal 、maxVal 无需赋值
其中,I(x,y)对应pstSrc,Iout(x,y)对应pstDst,mode、lowThr、highThr、minVal、midVal和maxVal分别对应pstThrCtrl的eMode、u8LowThr、u8HighThr、u8MinVal、u8MidVal和u8MaxVal。
pstThrCtrl 中的 u8MinVal、u8MidVal 和 u8MaxVal 并不需要满足变量命名含义中的大小关系。
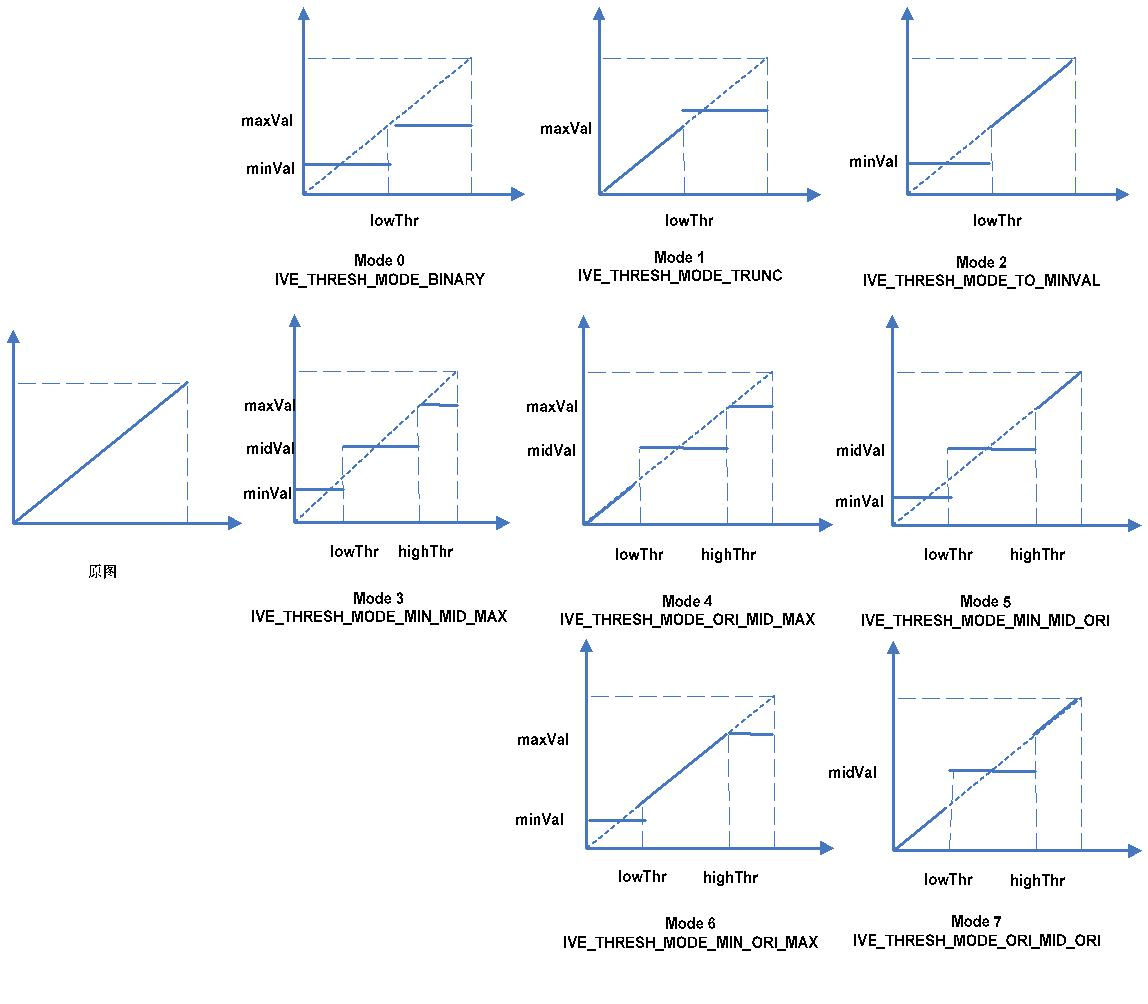
图1-7 Thresh 8 种阈值化模式示意图
-
相关主题
1.12. MI_IVE_And¶
-
功能
执行两二值图像相与任务。
-
语法
MI_S32 MI_IVE_And(MI_IVE_HANDLE hHandle, MI_IVE_SrcImage_t *pstSrc1, MI_IVE_SrcImage_t *pstSrc2, MI_IVE_DstImage_t *pstDst, MI_BOOL bInstant); -
形参
参数名称 描述 输入/输出 hHandle 区域句柄号。
取值范围:[0, MI_IVE_HANDLE_MAX)。输入 pstSrc1 源图像 1 指针。不能为空。 输入 pstSrc2 源图像 2 指针。不能为空。
高、宽同 pstSrc1。输入 pstDst 输出图像指针。不能为空。
高、宽同 pstSrc1。输出 bInstant 保留。 输入 参数名称 支持图像类型 地址对齐 分辨率 pstSrc1 U8C1 的二值图 1 byte 64x64~1920x1080 pstSrc2 U8C1 的二值图 1 byte 同 pstSrc1 pstDst U8C1 的二值图 1 byte 同 pstSrc1 -
返回值
返回值 描述 0 成功。 非 0 失败,参见错误码 -
依赖
-
头文件:mi_comm_ive.h、mi_ive.h、mi_ive.h
-
库文件:libive.a
-
-
注意
计算公式如下:
I_{out}(x,y)=I_{src1}(x,y)\&I_{src2}(x,y)其中, ( , ) 1 I x y src 对应 pstSrc1, ( , ) 2 I x y src 对应 pstSrc2,I (x, y) out 对应pstDst
-
相关主题
1.13. MI_IVE_Sub¶
-
功能
执行两灰度图像相减任务。
-
语法
MI_S32 MI_IVE_Sub(MI_IVE_HANDLE hHandle, MI_IVE_SrcImage_t *pstSrc1, MI_IVE_SrcImage_t *pstSrc2, MI_IVE_DstImage_t *pstDst, MI_IVE_SubCtrl_t *pstSubCtrl, MI_BOOL bInstant); -
形参
参数名称 描述 输入/输出 hHandle 区域句柄号。
取值范围:[0, MI_IVE_HANDLE_MAX)。输入 pstSrc1 源图像 1 指针。不能为空。 输入 pstSrc2 源图像 2 指针。不能为空。
高、宽同 pstSrc1。输入 pstDst 输出图像指针。不能为空。
高、宽同 pstSrc1。输出 pstSubCtrl 控制信息指针。不能为空。 输入 bInstant 保留。 输入 参数名称 支持图像类型 地址对齐 分辨率 pstSrc1 U8C1 1 byte 64x64~1920x1080 pstSrc2 U8C1 1 byte 同 pstSrc1 pstDst U8C1、S8C1 1 byte 同 pstSrc1 -
返回值
返回值 描述 0 成功。 非 0 失败,参见错误码。 -
依赖
-
头文件:mi_comm_ive.h、mi_ive.h、mi_ive.h
-
库文件:libive.a
-
-
注意
可以配置 2 种输出格式,具体参见 MI_IVE_SubMode_e 。
E_MI_IVE_SUB_MODE_ABS
-
计算公式:Iout(x,y)=abs(I*src*1(x,y)Isrc*2(*x,y))
-
输出格式:U8C1
E_MI_IVE_SUB_MODE_SHIFT
-
计算公式:Iout(x,y)=(I*src*1(x,y)Isrc*2(*x,y))>>1
-
输出格式:S8C1
其中,Isrc*1(*x,y)对应 pstSrc1,Isrc*2(*x,y)对应 pstSrc2,Iout(x,y)对应 pstDst。
-
-
相关主题
1.14. MI_IVE_Or¶
-
功能
执行两二值图像相或任务。
-
语法
MI_S32 MI_IVE_Or(MI_IVE_HANDLE hHandle, MI_IVE_SrcImage_t *pstSrc1, MI_IVE_SrcImage_t *pstSrc2, MI_IVE_DstImage_t *pstDst, MI_BOOL bInstant); -
形参
参数名称 描述 输入/输出 hHandle 区域句柄号。
取值范围:[0, MI_IVE_HANDLE_MAX)。输入 pstSrc1 源图像 1 指针。不能为空。 输入 pstSrc2 源图像 2 指针。不能为空。
高、宽同 pstSrc1。输入 pstDst 输出图像指针。不能为空。
高、宽同 pstSrc1。输出 bInstant 保留。 输入 参数名称 支持图像类型 地址对齐 分辨率 pstSrc1 U8C1 1 byte 64x64~1920x1080 pstSrc2 U8C1 1 byte 同 pstSrc1 pstDst U8C1 1 byte 同 pstSrc1 -
返回值
返回值 描述 0 成功。 非 0 失败,参见错误码。 -
依赖
-
头文件:mi_comm_ive.h、mi_ive.h、mi_ive.h
-
库文件:libive.a
-
-
注意
计算公式如下:
Iout(x,y)=Isrc*1(*x,y)|Isrc*2(*x,y)
其中,Isrc*1(*x,y)对应pstSrc1,Isrc*2(*x,y)对应pstSrc2,Iout(x,y)对应pstDst。
-
相关主题
1.15. MI_IVE_Integ¶
-
功能
执行灰度图像的积分图计算任务。
-
语法
MI_S32 MI_IVE_Integ(MI_IVE_HANDLE hHandle, MI_IVE_SrcImage_t *pstSrc, MI_IVE_DstImage_t *pstDst, MI_IVE_IntegCtrl_t *pstIntegCtrl, MI_BOOL bInstant); -
形参
参数名称 描述 输入/输出 hHandle 区域句柄号。
取值范围:[0, MI_IVE_HANDLE_MAX)。输入 pstSrc 源图像指针。不能为空。 输入 pstDst 输出图像指针。不能为空。
高、宽同 pstSrc。输出 pstIntegCtrl 控制信息指针。不能为空。 输入 bInstant 保留。 输入 参数名称 支持图像类型 地址对齐 分辨率 pstSrc U8C1 16 byte 32x16~1920x1080 pstDst U32C1、U64C1 16 byte 同 pstSrc -
返回值
返回值 描述 0 成功。 非 0 失败,参见错误码。 -
依赖
-
头文件:mi_comm_ive.h、mi_ive.h、mi_ive.h
-
库文件:libive.a
-
-
注意
E_MI_IVE_INTEG_OUT_CTRL_COMBINE,组合输出模式,输出图像类型必须为 E_MI_IVE_IMAGE_TYPE_U64C1,计算公式如下:
I_{sum}(x,y)=\sum^{i\leqslant x}_{i\geqslant0}\sum^{j\leqslant y}_{j\geqslant0}I(i,j)I_{sq}(x,y)=\sum^{i\leqslant x}_{i\geqslant0}\sum^{j\leqslant y}_{j\geqslant0}(I(i,j)*I(i,j))I_{out}(x,y)=(i_{sq}(x,y)<<28)|(I_{sum}(x,y)\&0xFFFFFFF)E_MI_IVE_INTEG_OUT_CTRL_SUM,仅和积分图输出模式,输出图像类型必须为 E_MI_IVE_IMAGE_TYPE_U32C1,计算公式如下:
I_{sum}(x,y)=\sum^{i\leqslant x}_{i\geqslant0}\sum^{j\leqslant y}_{j\geqslant0}I(i,j)I_{out}(x,y)=I_{sum}(x,y)E_MI_IVE_INTEG_OUT_CTRL_SQSUM,仅平方和积分图输出,输出图像类型必须为 E_MI_IVE_IMAGE_TYPE_U64C1,计算公式如下:
I_{sq}(x,y)=\sum^{i\leqslant x}_{i\geqslant0}\sum^{j\leqslant y}_{j\geqslant0}(I(i,j)*I(i,j))I_{out}(x,y)=I_{sq}(x,y)其中,I(x,y)对应pstSrc,Iout(x,y)对应pstDst。
1.16. MI_IVE_Hist¶
-
功能
执行灰度图像的直方图统计任务。
-
语法
MI_S32 MI_IVE_Hist(MI_IVE_HANDLE hHandle, MI_IVE_SrcImage_t *pstSrc, MI_IVE_DstMemInfo_t *pstDst, MI_BOOL bInstant); -
形参
参数名称 描述 输入/输出 hHandle 区域句柄号。
取值范围:[0, MI_IVE_HANDLE_MAX)。输入 pstSrc 源图像指针。不能为空。 输入 pstDst 输出数据指针。不能为空。
内存至少配置 1024 字节输出 bInstant 保留。 输入 参数名称 支持图像类型 地址对齐 分辨率 pstSrc U8C1 16 byte 64x64~1920x1080 pstDst - 16 byte - -
返回值
返回值 描述 0 成功。 非 0 失败,参见错误码。 -
依赖
-
头文件:mi_comm_ive.h、mi_ive.h、mi_ive.h
-
库文件:libive.a
-
-
注意
计算公式如下:
I_{out}(x)=\sum_i\sum_j((I(i,j)==x)?1:0) ,x=0...255其中,I(i,j)对应pstSrc,Iout(x)对应pstDst。
1.17. MI_IVE_ThreshS16¶
-
功能
执行 S16 数据到 8bit 数据的阈值化任务。
-
语法
MI_S32 MI_IVE_ThreshS16(MI_IVE_HANDLE hHandle, MI_IVE_SrcImage_t *pstSrc, MI_IVE_DstImage_t *pstDst, MI_IVE_ThreshS16Ctrl_t *pstThrS16Ctrl, MI_BOOL bInstant); -
形参
参数名称 描述 输入/输出 hHandle 区域句柄号。
取值范围:[0, RGN_HANDLE_MAX)。输入 pstSrc 源图像指针。不能为空。 输入 pstDst 输出图像指针。不能为空。
高、宽同 pstSrc。输出 pstThrS16Ctrl 控制参数指针。不能为空。 输入 bInstant 保留。 输入 参数名称 支持图像类型 地址对齐 分辨率 pstSrc S16C1 2 byte 64x64~1920x1080 pstDst U8C1、S8C1 1 byte 同 pstSrc -
返回值
返回值 描述 0 成功。 非 0 失败,参见错误码。 -
依赖
-
头文件:mi_comm_ive.h、mi_ive.h、mi_ive.h
-
库文件:libive.a
-
-
注意
可配置 4 种运算模式,参考 MI_IVE_ThreshS16Mode_e。
计算公式
-
E_MI_IVE_THRESH_S16_MODE_S16_TO_S8_MIN_MID_MAX:
I_{out}(x,y)=\left \{ \begin{aligned} minVal,(I(x,y)\leqslant lowThr) \\ midVal,(lowThr< I(x,y)\leqslant highThr) \\ maxVal,(I(x,y)> highThr) \end{aligned} \right.要求:
-32768≤lowThr ≤ highThr ≤32767;
-128≤ minVal 、midVal 、maxVal ≤127。
-
E_MI_IVE_THRESH_S16_MODE_S16_TO_S8_MIN_ORI_MAX:
I_{out}(x,y)=\left \{ \begin{aligned} minVal,(I(x,y)\leqslant lowThr) \\ I(x,y),(lowThr< I(x,y)\leqslant highThr) \\ maxVal,(I(x,y)> highThr) \end{aligned} \right.要求:
-129≤lowThr ≤ highThr ≤127;
-128≤ minVal 、maxVal ≤127;
-
E_MI_IVE_THRESH_S16_MODE_S16_TO_U8_MIN_MID_MAX:
I_{out}(x,y)=\left \{ \begin{aligned} minVal,(I(x,y)\leqslant lowThr) \\ midVal,(lowThr< I(x,y)\leqslant highThr) \\ maxVal,(I(x,y)> highThr) \end{aligned} \right.要求:
-32768≤lowThr ≤ highThr ≤32767;
0≤ minVal 、midVal 、maxVal ≤255。
-
E_MI_IVE_THRESH_S16_MODE_S16_TO_U8_MIN_ORI_MAX:
I_{out}(x,y)=\left \{ \begin{aligned} minVal,(I(x,y)\leqslant lowThr) \\ I(x,y),(lowThr< I(x,y)\leqslant highThr) \\ maxVal,(I(x,y)> highThr) \end{aligned} \right.要求:
-1≤lowThr ≤ highThr ≤255;
0≤ minVal 、maxVal ≤255。
其中,I(x,y)对应pstSrc,Iout (x,y)对应pstDst,mode、lowThr、highThr、minVal、midVal和maxVal分别对应pstThrS16Ctrl的eMode、s16LowThr、s16HighThr、un8MinVal、un8MidVal和un8MaxVal。
pstThrS16Ctrl中的un8MinVal、un8MidVal和un8MaxVal 并不需要满足变量命名含义中的大小关系。
-
-
相关主题
1.18. MI_IVE_ThreshU16¶
-
功能
执行 U16 数据到 U8 数据的阈值化任务。
-
语法
MI_S32 MI_IVE_ThreshU16(MI_IVE_HANDLE hHandle, MI_IVE_SrcImage_t *pstSrc, MI_IVE_DstImage_t *pstDst, MI_IVE_ThreshU16Ctrl_t *pstThrU16Ctrl, MI_BOOL bInstant); -
形参
参数名称 描述 输入/输出 hHandle 区域句柄号。
取值范围:[0, MI_IVE_HANDLE_MAX)。输入 pstSrc 源图像指针。不能为空。 输入 pstDst 输出图像指针。不能为空。
高、宽同 pstSrc。输出 pstThrU16Ctrl 控制参数指针。不能为空。 输入 bInstant 保留。 输入 参数名称 支持图像类型 地址对齐 分辨率 pstSrc U16C1 2 byte 64x64~1920x1080 pstDst U8C1 1 byte 同 pstSrc -
返回值
返回值 描述 0 成功。 非 0 失败,参见错误码。 -
依赖
-
头文件:mi_comm_ive.h、mi_ive.h、mi_ive.h
-
库文件:libive.a
-
-
注意
可配置 2 种运算模式,参考MI_IVE_ThreshU16Mode_e 。
计算公式
-
E_MI_IVE_THRESH_U16_MODE_U16_TO_U8_MIN_MID_MAX:
I_{out}(x,y)=\left \{ \begin{aligned} minVal,(I(x,y)\leqslant lowThr) \\ midVal,(lowThr< I(x,y)\leqslant highThr) \\ maxVal,(I(x,y)> highThr) \end{aligned} \right.要求:0≤ lowThr ≤ highThr ≤65535;
-
E_MI_IVE_THRESH_U16_MODE_U16_TO_U8_MIN_ORI_MAX:
I_{out}(x,y)=\left \{ \begin{aligned} minVal,(I(x,y)\leqslant lowThr) \\ I(x,y),(lowThr< I(x,y)\leqslant highThr) \\ maxVal,(I(x,y)> highThr) \end{aligned} \right.要求:0≤ lowThr ≤ highThr ≤255;
其中, I(x,y)对应pstSrc,Iout(x,y)对应pstDst,mode、lowThr、highThr、minVal、midVal 和maxVal分别对应pstThrU16Ctrl的eMode、u16LowThr、u16HighThr、u8MinVal、u8MidVal和u8MaxVal。
pstThrU16Ctrl 中的 u8MinVal、u8MidVal 和u8MaxVal 并不需要满足变量命名含义中的大小关系。
-
-
相关主题
1.19. MI_IVE_16BitTo8Bit¶
-
功能
执行 16bit 图像数据到 8bit 图像数据的线性转化任务。
-
语法
MI_S32 MI_IVE_16BitTo8Bit(MI_IVE_HANDLE hHandle, MI_IVE_SrcImage_t *pstSrc, MI_IVE_DstImage_t *pstDst, MI_IVE_16bitTo8BitCtrl_t *pst16BitTo8BitCtrl, MI_BOOL bInstant); -
形参
参数名称 描述 输入/输出 hHandle 区域句柄号。
取值范围:[0, MI_IVE_HANDLE_MAX)。输入 pstSrc 源图像指针。不能为空。 输入 pstDst 输出图像指针。不能为空。
高、宽同 pstSrc。输出 pst16BitTo8BitCtrl 控制参数指针。不能为空。 输入 bInstant 保留。 输入 参数名称 支持图像类型 地址对齐 分辨率 pstSrc U16C1、S16C1 2 byte 64x64~1920x1080 pstDst U8C1、S8C1 1 byte 同 pstSrc -
返回值
返回值 描述 0 成功。 非 0 失败,参见错误码。 -
依赖
-
头文件:mi_comm_ive.h、mi_ive.h、mi_ive.h
-
库文件:libive.a
-
-
注意
- 可配置 4 种模式,具体参考 MI_IVE_16BitTo8BitMode_e。
计算公式
-
E_MI_IVE_16BIT_TO_8BIT_MODE_S16_TO_S8:
I_{out}(x,y)=\left\{ \begin{aligned} -128,(\frac{a}{b}I(x,y)<-128) \\ \frac{a}{b}I(x,y),(-128\leqslant \frac{a}{b}I(x,y)\leqslant 127) \\ 127,(\frac{a}{b}I(x,y)>127) \end{aligned} \right. -
E_MI_IVE_16BIT_TO_8BIT_MODE_S16_TO_U8_ABS:
I_{out}(x,y)=\left\{ \begin{aligned} \left |\frac{a}{b}I(x,y) \right|,(\left| \frac{a}{b}I(x,y)\right|\leqslant 255) \\ 255,(\left| \frac{a}{b}I(x,y)\right|> 255) \end{aligned} \right. -
E_MI_IVE_16BIT_TO_8BIT_MODE_S16_TO_U8_BIAS:
I_{out}(x,y)=\left\{ \begin{aligned} 0,(\frac{a}{b}I(x,y)+bais< 0) \\ \frac{a}{b}I(x,y)+bais,(0\leqslant\frac{a}{b}I(x,y)+bais\leqslant 255) \\ 255, (\frac{a}{b}I(x,y)+bais> 255) \end{aligned} \right. -
E_MI_IVE_16BIT_TO_8BIT_MODE_U16_TO_U8:
I_{out}(x,y)=\left\{ \begin{aligned} 0,(\frac{a}{b}I(x,y)< 0) \\ \frac{a}{b}I(x,y),(0\leqslant\frac{a}{b}I(x,y)\leqslant 255) \\ 255, (\frac{a}{b}I(x,y)> 255) \end{aligned} \right.
其中,I(x,y)对应pstSrc,Iout(x,y)对应pstDst,mode、a、*b*和*bias*分别对应pst16BitTo8BitCtrl的eMode、u8Numerator、u16Denominator、s8Bias。
要求:u8Numerator ≤ u16Denominator,且 u16Denominator≠0。
-
相关主题
1.20. MI_IVE_OrdStatFilter¶
-
功能
执行 3x3 模板顺序统计量滤波任务,可进行 Median、Max、Min 滤波。
-
语法
MI_S32 MI_IVE_OrdStatFilter(MI_IVE_HANDLE hHandle, MI_IVE_SrcImage_t *pstSrc, MI_IVE_DstImage_t *pstDst, MI_IVE_OrdStatFilter_t *pstOrdStatFltCtrl, MI_BOOL bInstant); -
形参
参数名称 描述 输入/输出 hHandle 区域句柄号。
取值范围:[0, MI_IVE_HANDLE_MAX)。输入 pstSrc 源图像指针。不能为空。 输入 pstDst 输出图像指针。不能为空。
高、宽同 pstSrc。输出 pstOrdStatFltCtrl 控制参数指针不能为空。 输入 bInstant 保留。 输入 参数名称 支持图像类型 地址对齐 分辨率 pstSrc U8C1 16 byte 64x64~1920x1024 pstDst U8C1 16 byte 同 pstSrc -
返回值
返回值 描述 0 成功。 非 0 失败,参见错误码。 -
依赖
-
头文件:mi_comm_ive.h、mi_ive.h、mi_ive.h
-
库文件:libive.a
-
-
注意
- 可配置 3 种滤波模式,参考 MI_IVE_OrdStatFilterMode_e。
计算公式
-
E_MI_IVE_ORD_STAT_FILTER_MODE_MEDIAN:
I_{out}(x,y)=median_{-1\leqslant i\leqslant1,-1\leqslant j\leqslant1}\{I(x+i,y+j)\} -
E_MI_IVE_ORD_STAT_FILTER_MODE_MAX:
I_{out}(x,y)=max_{-1\leqslant i\leqslant1,-1\leqslant j\leqslant1}\{I(x+i,y+j)\} -
E_MI_IVE_ORD_STAT_FILTER_MODE_MIN:
I_{out}(x,y)=min_{-1\leqslant i\leqslant1,-1\leqslant j\leqslant1}\{I(x+i,y+j)\}
其中,I(x,y)对应pstSrc,Iout(x,y)对应pstDst。
-
相关主题
1.21. MI_IVE_Map¶
-
功能
执行 Map(映射赋值)任务,对源图像中的每个像素,查找 Map 查找表中的值,赋予目标图像相应像素查找表中的值,支持 U8C1U8C1模式的映像。
-
语法
MI_S32 MI_IVE_Map(MI_IVE_HANDLE hHandle, MI_IVE_SrcImage_t *pstSrc, MI_IVE_SrcMemInfo_t *pstMap, MI_IVE_DstImage_t *pstDst, MI_BOOL bInstant); -
形参
参数名称 描述 输入/输出 hHandle 区域句柄号。
取值范围:[0, MI_IVE_HANDLE_MAX)。输入 pstSrc 源图像指针。不能为空。 输入 pstMap 映射表信息指针。不能为空。
内存至少配置:sizeof(MI_IVE_MapLutMem_t)。输入 pstDst 输出图像指针。不能为空。
高、宽同 pstSrc。输出 bInstant 保留。 输入 参数名称 支持图像类型 地址对齐 分辨率 pstSrc U8C1 1 byte 64x64~1920x1080 pstMap - 16 byte - pstDst U8C1 1 byte 同 pstSrc -
返回值
返回值 描述 0 成功。 非 0 失败,参见错误码。 -
依赖
-
头文件:mi_comm_ive.h、mi_ive.h、mi_ive.h
-
库文件:libive.a
-
-
注意
计算公式如下:
I_{out}(x,y)=map[I(xy)]其中,I(x,y)对应pstSrc,Iout(x,y)对应pstDst,*map*对应pstMap。
1.22. MI_IVE_EqualizeHist¶
-
功能
执行灰度图像的直方图均衡化计算任务。
-
语法
MI_S32 MI_IVE_EqualizeHist(MI_IVE_HANDLE hHandle, MI_IVE_SrcImage_t *pstSrc, MI_IVE_DstImage_t *pstDst, MI_IVE_EqualizeHistCtrl_t *pstEqualizeHistCtrl, MI_BOOL bInstant); -
形参
参数名称 描述 输入/输出 hHandle 区域句柄号。
取值范围:[0, MI_IVE_HANDLE_MAX)。输入 pstSrc 源图像指针。不能为空。 输入 pstDst 输出图像指针。不能为空。
高、宽同 pstSrc。输出 pstEqualizeHistCtrl 控制参数指针。不能为空。 输入 bInstant 保留。 输入 参数名称 支持图像类型 地址对齐 分辨率 pstSrc U8C1 16 byte 64x64~1920x1080 pstDst U8C1 16 byte 同 pstSrc pstEqualizeHistCtrl→stMem - 16 byte - -
返回值
返回值 描述 0 成功。 非 0 失败,参见错误码。 -
依赖
-
头文件:mi_comm_ive.h、mi_ive.h、mi_ive.h
-
库文件:libive.a
-
-
注意
- pstEqualizeHistCtrl 中的 stMem,至少需开辟
sizeof()字节大小。
- 与 OpenCV 中直方图均衡化计算过程一致。
1.23. MI_IVE_Add¶
-
功能
执行两灰度图像的加权加计算任务。
-
语法
MI_S32 MI_IVE_Add(MI_IVE_HANDLE hHandle, MI_IVE_SrcImage_t *pstSrc1, MI_IVE_SrcImage_t *pstSrc2, MI_IVE_DstImage_t *pstDst, MI_IVE_AddCtrl_t *pstAddCtrl, MI_BOOL bInstant); -
形参
参数名称 描述 输入/输出 hHandle 区域句柄号。
取值范围:[0, MI_IVE_HANDLE_MAX)。输入 pstSrc1 源图像 1 指针。不能为空。 输入 pstSrc2 源图像 2 指针。不能为空。
高、宽同 pstSrc1。输入 pstDst 输出图像指针。
高、宽同 pstSrc1;不能为空。输出 pstAddCtrl 控制参数指针。不能为空。 输入 bInstant 保留。 输入 参数名称 支持图像类型 地址对齐 分辨率 pstSrc1 U8C1 1 byte 64x64~1920x1080 pstSrc2 U8C1 1 byte 同 pstSrc pstDst U8C1 1 byte 同 pstSrc -
返回值
返回值 描述 0 成功。 非 0 失败,参见错误码。 -
依赖
-
头文件:mi_comm_ive.h、mi_ive.h、mi_ive.h
-
库文件:libive.a
-
-
注意
计算公式如下:
I_{out}(x,y)=x*I_{src1}(x,y)+y*I_{src2}(x,y)其中,I*1(*i,j)对应pstSrc1,I*2(*i,j)对应pstSrc2,Iout(i,j)对应pstDst;x,y*为pstAddCtrl中的u0q16X,u0q16Y;要求定点化前的0\<*x\<1,0\<y\<1,且 x+y=1。
-
相关主题
1.24. MI_IVE_Xor¶
-
功能
执行两二值图的异或计算任务。
-
语法
MI_S32 MI_IVE_Xor(MI_IVE_HANDLE hHandle, *pstSrc1, *pstSrc2, *pstDst, MI_BOOL bInstant);
-
形参
参数名称 描述 输入/输出 hHandle 区域句柄号。
取值范围:[0, MI_IVE_HANDLE_MAX)。输入 pstSrc1 源图像 1 指针。不能为空。 输入 pstSrc2 源图像 1 指针。不能为空。
高、宽同 pstSrc1。输入 pstDst 输出图像指针。不能为空。
高、宽同 pstSrc1。输出 bInstant 保留。 输入 参数名称 支持图像类型 地址对齐 分辨率 pstSrc1 U8C1 1 byte 64x64~1920x1080 pstSrc2 U8C1 1 byte 同 pstSrc pstDst U8C1 1 byte 同 pstSrc -
返回值
返回值 描述 0 成功。 非 0 失败,参见错误码。 -
依赖
-
头文件:mi_comm_ive.h、mi_ive.h、mi_ive.h
-
库文件:libive.a
-
-
注意
计算公式如下:
I_{out}(x,y)=(I_{src1}(x,y))^{I_{src2}(x,y)}其中,Isrc*1(*x,y)对应pstSrc1,Isrc 2(x,y)对应pstSrc2,Idst(x,y)对应pstDst
-
相关主题
1.25. MI_IVE_Ncc¶
-
功能
执行两相同分辨率灰度图像的归一化互相关系数计算任务。
-
语法
MI_S32 MI_IVE_Ncc(MI_IVE_HANDLE hHandle, *pstSrc1, *pstSrc2, *pstDst, MI_BOOL bInstant);
-
返回值
参数名称 描述 输入/输出 hHandle 区域句柄号。
取值范围:[0, MI_IVE_HANDLE_MAX)。输入 pstSrc1 源 1 图像指针。不能为空。 输入 pstSrc2 源 2 图像指针。不能为空。
高、宽同 pstSrc1。输入 pstDst 输出数据指针。不能为空。
内存至少需配置:sizeof ()。输出 bInstant 保留。 输入 参数名称 支持图像类型 地址对齐 分辨率 pstSrc1 U8C1 1 byte 32x32~1920x1080 pstSrc2 U8C1 1 byte 同 pstSrc pstDst - 16 byte - -
返回值
返回值 描述 0 成功。 非 0 失败,参见错误码。 -
依赖
-
头文件:mi_comm_ive.h、mi_ive.h、mi_ive.h
-
库文件:libive.a
-
-
注意
计算公式如下
NCC(I_{src1},I_{src2})=\frac{\sum^w_{i-1}\sum^h_{j=1}(I_{src1}(i,j)*I_{src2}(i,j))}{\sqrt{\sum^w_{i=1}\sum^h_{j=1}(I^2_{src1}(i,j))}\sqrt{\sum^w_{i=1}\sum^h_{j=1}(I^2_{src2}(i,j))}}仅输出上面公式的分子、开方之前的两个分母项,即 pstDst→u64Numerator、 pstDst→u64QuadSum1、pstDst→u64QuadSum2 分别对应上面公式的
\sum^w_{i-1}\sum^h_{j=1}(I_{src1}(i,j)*I_{src2}(i,j))\sum^w_{i=1}\sum^h_{j=1}(I^2_{src1}(i,j))\sum^w_{i=1}\sum^h_{j=1}(I^2_{src2}(i,j))
1.26. MI_IVE_Ccl¶
-
功能
执行二值图像的连通区域标记任务。
-
语法
MI_S32 MI_IVE_Ccl(MI_IVE_HANDLE hHandle, MI_IVE_Image_t *pstSrcDst, MI_IVE_DstMemInfo_t *pstBlob, MI_IVE_CclCtrl_t *pstCclCtrl, MI_BOOL bInstant); -
形参
参数名称 描述 输入/输出 hHandle 区域句柄号。
取值范围:[0, MI_IVE_HANDLE_MAX)。输入 pstSrcDst 源图像指针,连通区域标记在源图像上进行,即源图像同时也是标记图像输出。不能为空。 输入、输出 pstBlob 连通区域信息指针。不能为空。
内存至少需配置为 sizeof (MI_IVE_CcBlob_t)大小,最多输出 254 个有效的连通区域。输出 pstCclCtrl 控制参数指针不能为空。 输入 bInstant 保留。 输入 参数名称 支持图像类型 地址对齐 分辨率 pstSrcDst U8C1 16 byte - pstBlob - 16 byte - -
返回值
返回值 描述 0 成功。 非 0 失败,参见错误码。 -
依赖
-
头文件:mi_comm_ive.h、mi_ive.h、mi_ive.h
-
库文件:libive.a
-
-
注意
-
连通区域的信息保存在 pstBlob→astRegion 中。
-
pstBlob→u8RegionNum 表示有效的连通区域数目,最多 254 个有效的连通区域; 有效的连通区域的面积大于 pstBlob→u16CurAreaThr,标记号为其所在 pstBlob→astRegion 数组元素的下标+1。有效的连通区域并不一定连续地存储在数组中,而很可能是间断的分布在数组中。
-
若 pstBlob→s8LabelStatus 为 0,则标记成功(一个区域一个标记);若为-1,则标记失败(一个区域多个标记或者多个区域共享一个标记)。对于后者,若用户需要正确的标记号,还需要再次根据 pstBlob 中的外接矩形信息重新标记。不管标记是否成功,连通区域的外接矩形信息一定是正确可用的。
-
输出的连通区域会用 stCclCtrl→u16InitAreaThr 进行筛选,面积小于等于pstCclCtrl→u16InitAreaThr 均会被置为 0。
-
当连通区域数目大于 254,会用 pstCclCtrl→u16InitAreaThr 删除面积小的连通区域;若 pstCclCtrl→u16InitAreaThr 不满足删除条件,会以 pstCclCtrl→u16Step 为步长,增大删除连通区域的面积阈值。
-
最终的面积阈值存储在 pstBlob→u16CurAreaThr 中。另外再用索引254记录被删除的连通区域总面积。
-
1.27. MI_IVE_Gmm¶
-
功能
执行 GMM 背景建模任务,支持灰度图、RGB_PACKAGE 图像的 GMM 背景建模,高斯模型个数为 3 或者 5。
-
语法
MI_S32 MI_IVE_Gmm(MI_IVE_HANDLE hHandle, *pstSrc, *pstFg, *pstBg, *pstModel, *pstGmmCtrl, MI_BOOL bInstant);
-
形参
参数名称 描述 输入/输出 hHandle 区域句柄号。
取值范围:[0, MI_IVE_HANDLE_MAX)。输入 pstSrc 源图像指针。不能为空。 输入 pstFg 前景图像指针。不能为空。
高、宽同 pstSrc。输出 pstBg 背景图像指针。不能为空。
高、宽同 pstSrc。输出 pstModel GMM 模型参数指针。不能为空。 输入、输出 pstGmmCtrl 控制参数指针。不能为空。 输入 bInstant 保留。 输入 参数名称 支持图像类型 地址对齐 分辨率 pstSrc U8C1、U8C3_PACKAGE 16 byte - pstFg U8C1 的二值图 16 byte - pstBg 同 pstSrc 16 byte - pstModel - 16 byte - -
返回值
返回值 描述 0 成功。 非 0 失败,参见错误码。 -
依赖
-
头文件:mi_comm_ive.h、mi_ive.h、mi_ive.h
-
库文件:libive.a
-
-
注意
-
GMM 的实现方式参考了 OpenCV 中的 MOG 和 MOG2。
-
源图像类型只能为 U8C1 或 U8C3_PACKAGE,分别用于灰度图和 RGB 图的 GMM 背景建模。
-
前景图像是二值图,类型只能为 U8C1;背景图像与源图像类型一致。灰度图像 GMM 采用n 个(n=3 或 5})高斯模型,pstModel 的内存排列方式如下图所示。

图1-8 灰度图像 GMM 模型的内存配置示意图
一个像素的单个高斯模型参数 weight 用 2 字节、mean 用 2 字节、var 用 3 字节; 因此 pstModel 需要分配的内存大小:
pstModel→u32Size = 7 * pstSrc→u16Width * pstSrc→u16Height * pstGmmCtrl→u8ModeNumRGB 图像 GMM 采用n 个(n=3 或 5})高斯模型,pstModel 的内存排列方式如下图所示。
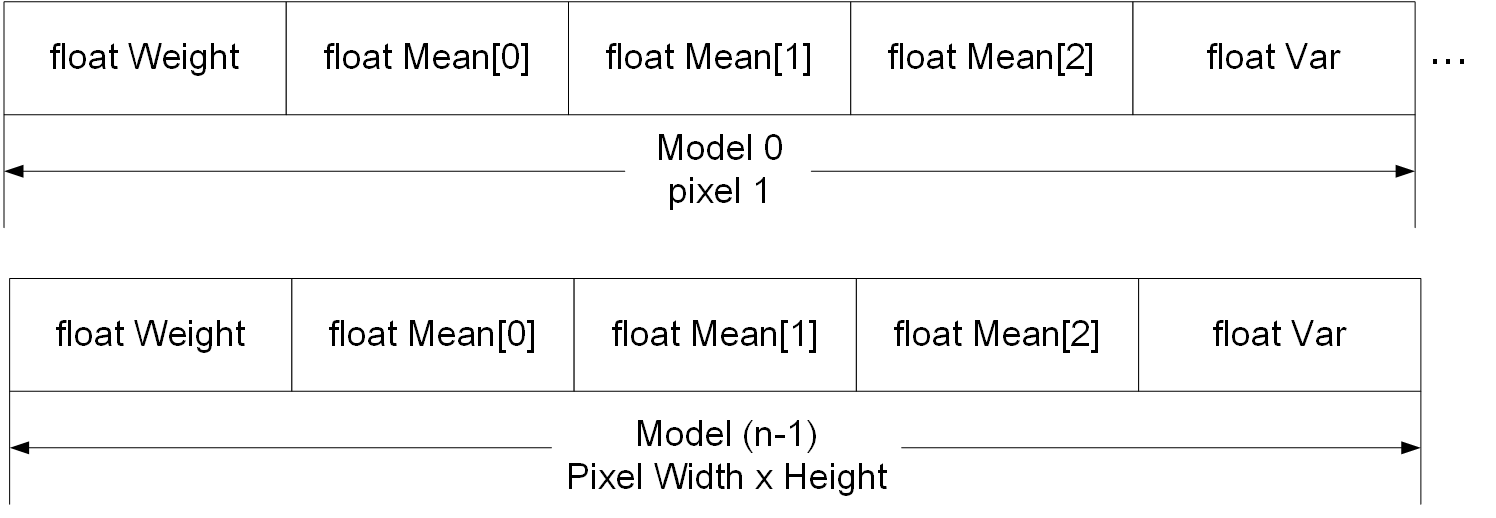
图 1‑9 RGB 图像 GMM 模型的内存配置示意图
一个像素的单个高斯模型参数 weight 用 4 字节、mean[3]用 4*3 字节、var 用 4 字节; 因此 pstModel 需要分配的内存大小:
pstModel→u32Size = 20 * pstSrc→u16Width * pstSrc→u16Height * pstGmmCtrl→u8ModeNum
-
1.28. MI_IVE_CannyHysEdge¶
-
功能
灰度图的 Canny 边缘提取的前半部:求梯度、计算梯度幅值幅角、磁滞阈值化及非极大抑制。
-
语法
MI_S32 MI_IVE_CannyHysEdge(MI_IVE_HANDLE hHandle, MI_IVE_SrcImage_t *pstSrc, MI_IVE_DstImage_t *pstEdge, MI_IVE_DstMemInfo_t *pstStack, MI_IVE_CannyHysEdgeCtrl_t *pstCannyHysEdgeCtrl, MI_BOOL bInstant); -
形参
参数名称 描述 输入/输出 hHandle 区域句柄号。
取值范围:[0, MI_IVE_HANDLE_MAX)。输入 pstSrc 源图像指针。不能为空。 输入 pstEdge 强弱边缘标志图像指针。不能为空。
高、宽同 pstSrc。输出 pstStack 强边缘点坐标栈。不能为空。
内存至少配置:pstSrc→u16Width * pstSrc→u16Height * (sizeof(MI_IVE_PointU16_t)) + sizeof(MI_IVE_CannyStackSize_t)输出 pstCannyHysEdgeCtrl 控制参数指针。不能为空。 输入 bInstant 保留。 输入 参数名称 支持图像类型 地址对齐 分辨率 pstSrc U8C1 16 byte 64x64~1920x1024 pstEdge U8C1 16 byte 同 pstSrc pstStack - 16 byte - pstCannyHysEdgeCtrl→stMem - 16 byte - -
返回值
返回值 描述 0 成功。 非 0 失败,参见错误码。 -
依赖
-
头文件:mi_comm_ive.h、mi_ive.h、mi_ive.h
-
库文件:libive.a
-
-
注意
-
pstEdge 仅有 0、1、2 三个取值:
-
0 表示弱边缘点
-
1 表示非边缘点
-
2 表示强边缘点
-
-
pstStack 中存储强边缘点的坐标信息。
-
pstCannyHysEdgeCtrl→stMem 至少需要分配的内存大小pstCannyHysEdgeCtrl→stMem.u32Size = IveGetStride(pstSrc→u16Width, MI_IVE_STRIDE_ALIGN)* 3 * pstSrc→u16Height。
-
该任务完成后,必须要使用 函数才能输出 Canny 边缘图像。
-
-
相关主题
1.29. MI_IVE_CannyEdge¶
-
功能
灰度图的 Canny 边缘提取的后半部:连接边缘点,形成 Canny 边缘图。
-
语法
MI_S32 MI_IVE_CannyEdge(MI_IVE_HANDLE hHandle, *pstEdge, *pstStack, MI_BOOL bInstant);
-
形参
参数名称 描述 输入/输出 hHandle 区域句柄号。
取值范围:[0, MI_IVE_HANDLE_MAX)。输入 pstEdge 作为输入是强弱边缘标志图像指针;作为输出是边缘二值图像指针。不能为空。 输入、输出 pstStack 强边缘点坐标栈。不能为空。 输入、输出 bInstant 保留。 输入 参数名称 支持图像类型 地址对齐 分辨率 pstEdge U8C1 16 byte 64x64~1920x1024 pstStack - 16 byte - -
返回值
返回值 描述 0 成功。 非 0 失败,参见错误码。 -
依赖
-
头文件:mi_comm_ive.h、mi_ive.h、mi_ive.h
-
库文件:libive.a
-
-
注意
使用该接口前必须调用 ,在保证 MI_IVE_CannyHysEdge 任务完成的情况下,使用 MI_IVE_CannyHysEdge 的输出 pstEdge、pstStack 作为该接口的参数输入。
-
相关主题
1.30. MI_IVE_Lbp¶
-
功能
执行 LBP 计算任务。
-
语法
MI_S32 MI_IVE_Lbp(MI_IVE_HANDLE hHandle, MI_IVE_SrcImage_t *pstSrc1, MI_IVE_SrcImage_t *pstSrc2, MI_IVE_DstImage_t *pstDst, MI_IVE_LbpCtrrl_t *pstLbpCtrl, MI_BOOL bInstant); -
形参
参数名称 描述 输入/输出 hHandle 区域句柄号。
取值范围:[0, MI_IVE_HANDLE_MAX)。输入 pstSrc1 源图像指针。不能为空。 输入 pstSrc2 源图像指针。不能为空。
如果输入的 channel mode 是 U8C1.则可以为空。输入 pstDst 输出图像指针。不能为空。
高、宽同 pstSrc。输出 pstLbpCtrl 控制信息指针。不能为空。 输入 bInstant 保留。 输入 参数名称 支持图像类型 地址对齐 分辨率 pstSrc U8C1 16 byte 64x64~1920x1024 pstDst U8C1 16 byte 64x64~1920x1024 -
返回值
返回值 描述 0 成功。 非 0 失败,参见错误码。 -
依赖
-
头文件:mi_comm_ive.h、mi_ive.h、mi_ive.h
-
库文件:libive.a
-
-
注意
LBP U8C1 mode的计算公式如下所示。
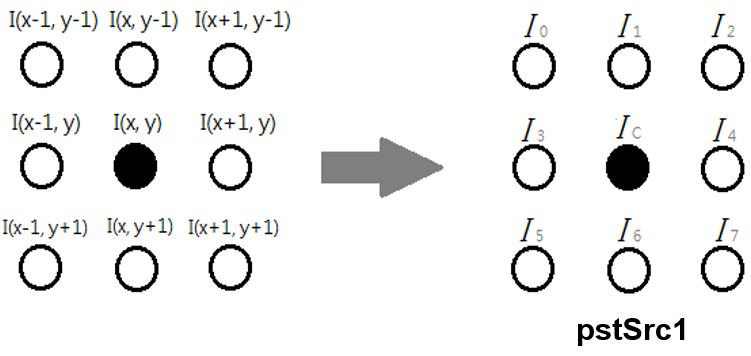
图 1‑10 LBP 计算公式示意图
LBP U8C2 mode的计算示意图如下

E_MI_IVE_LBP_CMP_NORMAL

E_MI_IVE_LBP_CMP_ABS

E_MI_IVE_LBP_CMP_ABS_MUL

其中,在 U8C1 模式下,I(x,y)对应pstSrc1,lpb(x,y)对应pstDst,*thr*对应pstLbpCtrl→un8BitThr。而U8C2 模式下, Ic对应的是 pstSrc2
1.31. MI_IVE_NormGrad¶
-
功能
执行归一化梯度计算任务,梯度分量均归一化到 S8。
-
语法
MI_S32 MI_IVE_NormGrad(MI_IVE_HANDLE hHandle, MI_IVE_SrcImage_t *pstSrc, MI_IVE_DstImage_t *pstDstH, MI_IVE_DstImage_t *pstDstV, MI_IVE_DstImage_t *pstDstHV, MI_IVE_NormGradCtrl_t *pstNormGradCtrl, MI_BOOL bInstant); -
形参
参数名称 描述 输入/输出 hHandle 区域句柄号。
取值范围:[0, MI_IVE_HANDLE_MAX)。输入 pstSrc 源图像指针。不能为空。 输入 pstDstH 由模板直接滤波并归一到 S8 后得到的梯度分量图像(H)指针。
根据 pstNormGradCtrl→eOutCtrl,若需要输出则不能为空。输出 pstDstV 由转置后的模板滤波并归一到 S8 后得到的梯度分量图像(V)指针。
根据 pstNormGradCtrl→eOutCtrl,若需要输出则不能为空。输出 pstDstHV 由模板和转置后的模板直接滤波,并且均归一到 S8 后,采用package 格式存储的图像指针。 根据 pstNormGradCtrl→eOutCtrl,若需要输出则不能为空。 输出 pstNormGradCtrl 控制信息指针。 输入 bInstant 保留。 输入 参数名称 支持图像类型 地址对齐 分辨率 pstSrc U8C1 16 byte 64x64~1920x1024 pstDstH S8C1 16 byte 同 pstSrc pstDstV S8C1 16 byte 同 pstSrc pstDstHV S8C2_PACKAGE 16 byte 同 pstSrc -
返回值
返回值 描述 0 成功。 非 0 失败,参见错误码。 -
依赖
-
头文件:mi_comm_ive.h、mi_ive.h、mi_ive.h
-
库文件:libive.a
-
-
注意
-
控制参数中输出模式如下:
-
E_MI_IVE_NORM_GRAD_OUT_CTRL_HOR_AND_VER 时,pstDstH 和 pstDstV 指针不能为空,且要求跨度一致;
-
E_MI_IVE_NORM_GRAD_OUT_CTRL_HOR 时,pstDstH 不能为空;
-
E_MI_IVE_NORM_GRAD_OUT_CTRL_VER 时,pstDstV 不能为空;
-
E_MI_IVE_NORM_GRAD_OUT_CTRL_COMBINE 时,pstDstHV 不能为空。
-
-
-
相关主题
1.32. MI_IVE_LkOpticalFlow¶
-
功能
执行单层 LK 光流计算任务。
-
语法
MI_S32 MI_IVE_LKOpticalFlow(MI_IVE_HANDLE hHandle, MI_IVE_SrcImage_t *pstSrcPre, MI_IVE_SrcImage_t *pstSrcCur, MI_IVE_SrcMemInfo_t *pstPoint, MI_IVE_MemInfo_t *pstMv, MI_IVE_LkOpticalFlowCtrl_t *pstLkOptiFlowCtrl, MI_BOOL bInstant); -
形参
参数名称 描述 输入/输出 hHandle 区域句柄号。
取值范围:[0, MI_IVE_HANDLE_MAX)。输入 pstSrcPre 前一帧图像指针。不能为空。 输入 pstSrcCur 当前图像指针。不能为空。
高、宽同 pstSrcPre。输入 pstPoint 当前金字塔层的初始特征点坐标。不能为空。 坐标只能为MI_IVE_PointS25Q7_t 类型;内存至少需分配:pstLkOptiFlowCtrl→u16CornerNum * sizeof(MI_IVE_PointS25Q7_t )。 输入 pstMv 对应于 pstPoint 的特征点运动位移矢量。不能为空。首次计算需初始化为 0 输入;后续层计算需输入上一层计算得到的运动位移矢量;位移只能为 MI_IVE_MvS9Q7_t 类型;内存至少需分配: pstLkOptiFlowCtrl→u16CornerNum * sizeof(MI_IVE_MvS9Q7_t) 输入、输出 pstLkOptiFlowCtrl 控制参数指针。不能为空。 输入 bInstant 保留。 输入 参数名称 支持图像类型 地址对齐 分辨率 pstSrcPre U8C1 16 byte 64x64~720x576 pstSrcCur U8C1 16 byte 同 pstSrcPre -
返回值
返回值 描述 0 成功。 非 0 失败,参见错误码。 -
依赖
-
头文件:mi_comm_ive.h、mi_ive.h、mi_ive.h
-
库文件:libive.a
-
-
注意
-
求解下面的光流方程中,仅用到特征点周围 7X7 像素的来计算对应的*Ix*、Iy、It

其中,Ix、Iy、It*分别表示当前图像在*x、y方向的偏导,当前图像与前一帧图像的差分。
-
以 3 层金字塔 LK 光流计算为例,要求每层图像的高、宽是上一层图像高、宽的一半,其计算示意图如下所示。

图 1‑11 3 层金字塔 LK 光流计算示意图
-
根据输入的特征点坐标,计算出 3 层金字塔特征点对应的坐标:p0,p1,p2;
-
以 p2 和初始为 0 的 mv2 作为输入调用 LK 算子求出在第 2 层上的位移 mv2;
-
以 p1 和 mv2 作为输入调用 LK 算子求出第 1 层上的位移 mv1;
-
以 p0 和 mv1 作为输入调用 LK 算子求出第 0 层上的位移 mv0;
-
若第 0 层不是原始图像,根据第 0 层与原始图像的的比例关系可以得到 LK 光流的真正位移 mv。
请注意设计和使用限制:每个特征点仅以该特征点为中心固定大小窗口的数据进 行计算,若迭代计算过程中,该特征点位移目标点超出该固定大小窗口会导致计 算光流失败。
-
-
1.33. MI_IVE_Sad¶
-
功能
计算两幅图像按 4x4\8x8\16x16 分块的 16 bit\8 bit SAD 图像,以及对 SAD 进行阈值化输出。
-
语法
MI_S32 MI_IVE_Sad(MI_IVE_HANDLE hHandle, MI_IVE_SrcImage_t *pstSrc1, MI_IVE_SrcImage_t *pstSrc2, MI_IVE_DstImage_t *pstSad, MI_IVE_DstImage_t *pstThr, MI_IVE_SadCtrl_t *pstSadCtrl, MI_BOOL bInstant); -
形参
参数名称 描述 输入/输出 hHandle 区域句柄号。
取值范围:[0, MI_IVE_HANDLE_MAX)。输入 pstSrc1 源图像 1 指针。不能为空。 输入 pstSrc2 源图像 2 指针。不能为空。
高、宽同 pstSrc1。输入 pstSad 输出 SAD 图像指针。根据 pstSadCtrl→eOutCtrl,若需要输出则不能为空。 根据 pstSadCtrl→eMode,对应 4x4、8x8、16x16 分块模式,高、宽分别为 pstSrc1 的 ¼、⅛、1/16。 输出 pstThr 输出 SAD 阈值化图像指针。根据 pstSadCtrl→eOutCtrl,若需要输出则不能为空。 根据 pstSadCtrl→eMode,对应 4x4、8x8、16x16 分块模式,高、宽分别为 pstSrc1 的 ¼、⅛、1/16。 输出 pstSadCtrl 控制信息指针。不能为空。 输入 bInstant 保留。 输入 参数名称 支持图像类型 地址对齐 分辨率 pstSrc1 U8C1 1 byte 64x64~1920x1080 pstSrc2 U8C1 1 byte 同 pstSrc1 pstSad U8C1 、U16C1 16 byte 根据 pstSadCtrl→eMode, 对应 4x4、8x8、16x16 分块模式,高、宽分别为 pstSrc1 的 ¼、⅛、1/16。 pstThr U8C1 16 byte 根据 pstSadCtrl→eMode, 对应 4x4、8x8、16x16 分块模式,高、宽分别为 pstSrc1 的 ¼、⅛、1/16。 -
返回值
返回值 描述 0 成功。 非 0 失败,参见错误码。 -
依赖
-
头文件:mi_comm_ive.h、mi_ive.h、mi_ive.h
-
库文件:libive.a
-
-
注意
计算公式如下:


其中,I*1(*i,j)对应pstSrc1,I*2(*i,j)对应pstSrc2,SADout(x,y)对应pstSad,n*与pstSadCtrl→eMode相关,对应E_MI_IVE_SAD_MODE_MB_4X4、E_MI_IVE_SAD_MODE_MB_8X8、E_MI_IVE_SAD_MODE_MB_16X16 时分别取 4、8、16;*THRout(x,y)对应pstThr,Thr、*minVal*和*maxVal*分别对应pstSadCtrl→u16Thr、pstSadCtrl→u8MinVal和pstSadCtrl→u8MaxVal。
1.34. MI_IVE_Bernsen¶
-
功能
执行 3x3 和 5x5 模板的 Bernsen 门坎值任务。
-
语法
MI_S32 MI_IVE_Bernsen(MI_IVE_HANDLE hHandle, MI_IVE_SrcImage_t *pstSrc, MI_IVE_DstImage_t *pstDst,MVE_IVE_BernsenCtrl_t *pstBernsenCtrl,MI_BOOL bInstant);
-
形参
参数名称 描述 输入/输出 hHandle 区域句柄号。
取值范围:[0, MI_IVE_HANDLE_MAX)。输入 pstSrc 源图像指针。不能为空。 输入 pstDst 输出 Bernsen 图像指针。 输出 pstBernsenCtrl 控制信息指针。不能为空。 输入 bInstant 保留。 输入 参数名称 支持图像类型 地址对齐 分辨率 pstSrc U8C1 16 byte 64x64~1920x1080 pstDst S8C1 16 byte 同 pstSrc -
返回值
返回值 描述 0 成功。 非 0 失败,参见错误码。 -
依赖
-
头文件:mi_comm_ive.h、mi_ive.h、mi_ive.h
-
库文件:libive.a
-
-
注意
目前支持两种模式,计算公式如下:
-
MVE_BERNSEN_MODE_NORMAL
T(x,y)=0.5*(max_{-\omega\leqslant i\leqslant \omega,-\omega\leqslant j\leqslant \omega}I(x+i,y+j)+min_{-\omega\leqslant i\leqslant \omega,-\omega\leqslant j\leqslant \omega}I(x+i,y+j))I_{out}(x,y)=\left \{ \begin{aligned} 0,I(x,y)< T(x,y) \\ 1,I(x,y)\leqslant T(x,y) \end{aligned} \right.pstBernsenCtrl->u8Thr 无须设定
-
MVE_BERNSEN_MODE_THRESH
T(x,y)=0.5*(max_{-\omega\leqslant i\leqslant \omega,-\omega\leqslant j\leqslant \omega}I(x+i,y+j)+min_{-\omega\leqslant i\leqslant \omega,-\omega\leqslant j\leqslant \omega}I(x+i,y+j))I_{out}(x,y)=\left \{ \begin{aligned} 0,I(x,y)< 0.5*T(x,y)+Thr \\ 1,I(x,y)\geqslant 0.5*T(x,y)+Thr \end{aligned} \right.
I(x,y) 对应到 pstSrc, Iout(x,y) 对应到 pstDst, and Thr 对应到 pstBernsenCtrl 里的u8thr.
-
1.35. MI_IVE_LineFilterHor¶
-
功能
针对二位图像进行水平方向的滤波任务。
-
语法
MI_S32 MI_IVE_LineFilterHor(MI_IVE_HANDLE hHandle, MI_IVE_SrcImage_t *pstSrcDst, MVE_IVE_LineFilterHorCtrl_t *pstLineFilterHorCtrl, MI_BOOL bInstant);
-
形参
参数名称 描述 输入/输出 hHandle 区域句柄号。 取值范围:[0, MI_IVE_HANDLE_MAX)。 输入 pstSrcDst 源图像与输出图像指针。不能为空。 输入/输出 pstLineFilterHorCtrl 控制信息指针。不能为空。 输入 bInstant 保留。 输入 参数名称 支持图像类型 地址对齐 分辨率 pstSrcDst U8C1 的二值化影像 16 byte 64x64~1920x1080 -
返回值
返回值 描述 0 成功。 非 0 失败,参见错误码。 -
依赖
-
头文件:mi_comm_ive.h、mi_ive.h、mi_ive.h
-
库文件:libive.a
-
-
注意
对输入图像进行水平方向扫描,当发现黑色线段的长度满足下面条件所述,则将此黑色线段转换为白色线段。
计算公式如下:
-
先水平扫描,并记录水平黑线和白点交错信息,范例如下
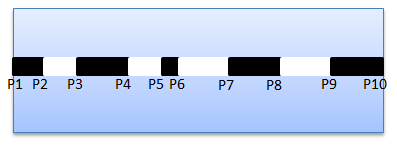
-
针对上述步骤进行水平扫描黑转白操作。
举例 : 假设当前黑色线段为 line_black56, 如果此线段长度满足下面条件,及转换为白线
条件 1 : line_black34 > thr1
条件 2 : line_black78 > thr1
条件 3 :
(line_white45 + line_black56 + line_white67) \<= (line_white45 + line_white67)thr2
条件 4 : (line_white45 + line_white67) > 1
-
步骤三 : 继续上述二步骤,直到处理完整张影像,结果如下

-
步骤四 : 根据上面结果重新进行第二次扫描,并根据黑线与白线的关系进行黑转白操作。
举例 : 假设当前黑线为line_black34,如果满足下面条件,则将黑线转为白线。
条件 1 : line_block34 \< thr3
条件 2 : line_white47 > 2thr3
条件 3 : line_white23 > 9
条件 4 : line_white23 \< 3thr3
-
步骤五 : 反复执行部步骤三和四,直到整张图像处理完毕。
-
1.36. MI_IVE_LineFilterVer¶
-
功能
针对二位图像进行垂直方向的滤波任务。
-
语法
MI_S32 MI_IVE_LineFilterVer(MI_IVE_HANDLE hHandle, MI_IVE_SrcImage_t *pstSrcDst, MVE_IVE_LineFilterVerCtrl_t *pstLineFilterVerCtrl, MI_BOOL bInstant); -
形参
参数名称 描述 输入/输出 hHandle 区域句柄号。 取值范围:[0, MI_IVE_HANDLE_MAX)。 输入 pstSrcDst 源图像与输出图像指针。不能为空。 输入/输出 pstLineFilterVerCtrl 控制信息指针。不能为空。 输入 bInstant 保留。 输入 参数名称 支持图像类型 地址对齐 分辨率 pstSrcDst U8C1 的二值化影像 16 byte 64x64~1920x1080 -
返回值
返回值 描述 0 成功。 非 0 失败,参见错误码。 -
依赖
-
头文件:mi_comm_ive.h、mi_ive.h、mi_ive.h
-
库文件:libive.a
-
-
注意
对输入图像进行垂直方向扫描,当发现黑色线段的长度满足下面条件所述,则将此黑色线段转换为白色线段。
计算公式如下
-
步骤一 : 先垂直扫描,并记录水平黑线和白点交错信息,范例如下
-
步骤二: 假设当前黑色线段为 line_black56,若黑色线段长度满足下面条件,则将黑线转白线。
Condition 1 : line_black56 \< thr
Condition 2 : line_black67 > 6 & line_whitr67 \< 25
Condition 3 : line_white45 \< 12
-
步骤三 : 根据前面步骤一和步骤二,将整张图像处理完毕。
-
1.37. MI_IVE_NoiseRemoveHor¶
-
功能
针对二位图像进行水平方向之噪声滤除任务。
-
语法
MI_S32 MI_IVE_NoiseRemoveHor(MI_IVE_HANDLE hHandle, MI_IVE_SrcImage_t *pstSrcDst, MVE_IVE_NoiseRemoveHorCtrl_t *pstNoiseRemoveHorCtrl, MI_BOOL bInstant); -
形参
参数名称 描述 输入/输出 hHandle 区域句柄号。 取值范围:[0, MI_IVE_HANDLE_MAX)。 输入 pstSrcDst 源图像与输出图像指针。不能为空。 输入/输出 pstNoiseRemoveHorCtrl 控制信 息指针。不能为空。 输入 bInstant 保留。 输入 参数名称 支持图像类型 地址对齐 分辨率 pstSrcDst U8C1 的二值化影像 16 byte 64x64~1920x1080 -
返回值
返回值 描述 0 成功。 非 0 失败,参见错误码。 -
依赖
-
头文件:mi_comm_ive.h、mi_ive.h、mi_ive.h
-
库文件:libive.a
-
-
注意
对输入图像进行水平方向扫描,当白色线段长度小于 thr1,或是大于 thr2,则将白线转化为黑线。
1.38. MI_IVE_NoiseRemoveVer¶
-
功能
针对二位图像进行水平方向之噪声滤除任务。
-
语法
MI_S32 MI_IVE_NoiseRemoveHor(MI_IVE_HANDLE hHandle, MI_IVE_SrcImage_t *pstSrcDst, MVE_IVE_NoiseRemoveVerCtrl_t *pstNoiseRemoveVerCtrl, MI_BOOL bInstant); -
形参
参数名称 描述 输入/输出 hHandle 区域句柄号。取值范围:[0, MI_IVE_HANDLE_MAX)。 输入 pstSrcDst 源图像与输出图像指针。不能为空。 输入/输出 pstNoiseRemoveVerCtrl 控制信 息指针。不能为空。 输入 bInstant 保留。 输入 参数名称 支持图像类型 地址对齐 分辨率 pstSrcDst U8C1 的二值化影像 16 byte 64x64~1920x1080 -
返回值
返回值 描述 0 成功。 非 0 失败,参见错误码。 -
依赖
-
头文件:mi_comm_ive.h、mi_ive.h、mi_ive.h
-
库文件:libive.a
-
-
注意
对输入图像进行垂直方向扫描,当白色线段长度小于 thr1,或是大于 thr2,则将白线转化为黑线。
1.39. MI_IVE_AdpThresh¶
-
功能
执行使用自适应性门坎值的二值化任务。
-
语法
MI_S32 MI_IVE_AdpThresh(MI_IVE_HANDLE hHandle, MI_IVE_SrcImage_t *pstSrc, MI_IVE_SrcImage_t *pstInteg, MI_IVE_DstImage_t *pstDst, MVE_IVE_AdpThreshCtrl_t *pstAdpThrCtrl, MI_BOOL bInstant); -
形参
参数名称 描述 输入/输出 hHandle 区域句柄号。 取值范围:[0, MI_IVE_HANDLE_MAX)。 输入 pstSrc 源图像指针。不能为空。 输入 pstInteg 输入积分影像指针。不能为空。 输入 pstDst 输出图像指针。不能为空。 输出 pstAdpThrCtrl 控制信 息指针。不能为空。 输入 bInstant 保留。 输入 参数名称 支持图像类型 地址对齐 分辨率 pstSrcDst U8C1 16 byte 64x64~1920x1080 pstInteg U32C1 16 byte 64x64~1920x1080 pstDst U8C1 16 byte 64x64~1920x1080 -
返回值
返回值 描述 0 成功。 非 0 失败,参见错误码。 -
依赖
-
头文件:mi_comm_ive.h、mi_ive.h、mi_ive.h
-
库文件:libive.a
-
-
注意
计算公式如下
I(x, y) 对应到 pstSrc, Iout(x,y) 对应到 pstDst, W , h , RateThr , 0ffset 和 ValueThr 对应到 pstAdpThrCtrl 里的 u8HalfMaskx , u8HalfMasky , u8RateThr , s16Offset 和 u8ValueThr. 积分影像计算公式如下
1.40. MI_IVE_Resize¶
-
功能
执行缩放影像任务。
-
语法
MI_S32 MI_IVE_Resize(MI_IVE_HANDLE hHandle, MI_IVE_SrcImage_t *pstSrc, MI_IVE_DstImage_t *pstDst, MVE_IVE_ResizeCtrl_t * pstResizeCtrl, MI_BOOL bInstant); -
形参
参数名称 描述 输入/输出 hHandle 区域句柄号。取值范围:[0, MI_IVE_HANDLE_MAX)。 输入 pstSrc 源图像指针。不能为空。 输入 pstDst 输出图像指针。不能为空。 输出 pstResizeCtrl 控制信息指针。不能为空。 输入 bInstant 保留。 输入 参数名称 支持图像类型 地址对齐 分辨率 pstSrcDst U8C1, U8C3_PLANAR,U8C3_PACKAGE和 YUV420SP 16 byte 64x64~1920x1080 pstDst U8C1, U8C3_PLANAR,U8C3_PACKAGE and YUV420SP 16 byte 64x64~1920x1080 -
返回值
返回值 描述 0 成功。 非 0 失败,参见错误码。 -
依赖
-
头文件:mi_comm_ive.h、mi_ive.h、mi_ive.h
-
库文件:libive.a
-
-
注意
实现方法参考标准的 bilinear。
1.41. MI_IVE_Bat¶
-
功能
针对二位图像执行水平和垂直方向的数值交替次数计算任务。
-
语法
MI_S32 MI_IVE_BAT (MI_IVE_HANDLE hHandle, MI_IVE_SrcImage_t *pstSrc, MI_IVE_DstMemInfo_t *pstDstH, MI_IVE_DstMemInfo_t *pstDstV, MVE_IVE_BatCtrl_t *pstCtrl, MI_BOOL bInstant);
-
形参
参数名称 描述 输入/输出 hHandle 区域句柄号。 取值范围:[0, MI_IVE_HANDLE_MAX)。 输入 pstSrc 源图像指针。不能为空。 输入 pstDstH 输t出水平图像指针。不能为空。 输出 pstDstV 输t出垂直图像指针。不能为空。 输出 pstCtrl 控制信息指针。不能为空。 输入 bInstant 保留。 输入 参数名称 支持图像类型 地址对齐 分辨率 pstSrc U8C1 binary image 16 byte 64x64~1920x1080 pstDstH U8C1 binary image 16 byte 64x64~1920x1080 pstDstV U8C1 binary image 16 byte 64x64~1920x1080 -
返回值
返回值 描述 0 成功。 非 0 失败,参见错误码。 -
依赖
-
头文件:mi_comm_ive.h、mi_ive.h、mi_ive.h
-
库文件:libive.a
-
-
注意
计算公式如下 :
O(h)=\left\{ \begin{aligned} 1,h\geqslant u16HorTimes \\ 0,h< u16HorTimes \end{aligned} \right.O(v)=\left\{ \begin{aligned} 1,v\geqslant u16HorTimes \\ 0,v< u16HorTimes \end{aligned} \right.h/v 对应到水平/垂直次数,O(h)/ O(v) 对应到水平/垂直输入图像。
1.42. MI_IVE_Acc¶
-
功能
执行两灰度图像的累积运算任务。
-
语法
MI_S32 MI_IVE_Acc (MI_IVE_HANDLE hHandle, MI_IVE_SrcImage_t * pstSrc0, MI_IVE_SrcImage_t *pstSrc1, MI_IVE_DstImage_t *pstDst, MVE_IVE_AccCtrl_t * pstAccCtrl, MI_BOOL bInstant); -
形参
参数名称 描述 输入/输出 hHandle 区域句柄号。 取值范围:[0, MI_IVE_HANDLE_MAX)。 输入 pstSrc0 源图像 1 指针。不能为空。 输入 pstSrc1 源图像 2 指针。不能为空。 输入 pstDst 输t出图像指针。不能为空。 输出 pstAccCtrl 控制信息指针。不能为空。 输入 bInstant 保留。 输入 参数名称 支持图像类型 地址对齐 分辨率 pstSrc0 U8C1 16 byte 64x64~1920x1080 pstSrc1 U8C1 16 byte 64x64~1920x1080 pstDst U8C1 16 byte 64x64~1920x1080 -
返回值
返回值 描述 0 成功。 非 0 失败,参见错误码。 -
依赖
-
头文件:mi_comm_ive.h、mi_ive.h、mi_ive.h
-
库文件:libive.a
-
-
注意
计算公式如下 :
E_MI_IVE_ACC_MODE_INCREASE :
I_{out}(x,y)=I_{src0}(x,y)+I_{src1}(x,y)E_MI_IVE_ACC_MODE_DECREASE :
I_{out}(x,y)=I_{src0}(x,y)-I_{src1}(x,y)E_MI_IVE_ACC_MODE_INCREASE_MAP_255TO1 :
I_{out}(x,y)=I_{src0}(x,y)+(I_{src1}(x,y)\&0x1)
1.43. MI_IVE_Matrix_Transform¶
-
功能
执行矩阵运算任务。
-
语法
MI_S32 MI_IVE_Matrix_Transform(MI_IVE_HANDLE hHandle, MI_IVE_SrcImage_t *pstSrc1, MI_IVE_SrcImage_t *pstSrc2, MI_IVE_SrcImage_t *pstSrc3, MI_IVE_DstImage_t *pstDst1, MI_IVE_DstImage_t *pstDst2, MI_IVE_DstImage_t *pstDst3, MI_IVE_MatrTranfCtrl_t *pstMatrTranfCtrl, MI_BOOL bInstant); -
形参
参数名称 描述 输入/输出 hHandle 区域句柄号。 取值范围:[0, MI_IVE_HANDLE_MAX)。 输入 pstSrc1 源图像指针。不能为空。 输入 pstSrc2 源图像指针。不能为空。 输入 pstSrc3 源图像指针。不能为空。 输入 pstDst1 输t出图像指针。不能为空。 输出 pstDst2 输t出图像指针。不能为空。 输出 pstDst3 输t出图像指针。不能为空。 输出 pstMatrTranfCtrl 控制信息指针。不能为空。 输入 bInstant 保留。 输入 参数名称 支持图像类型 地址对齐 分辨率 pstSrc1 S32C1 16 byte 64x64~1920x1080 pstSrc2 S32C1 16 byte 64x64~1920x1080 pstSrc3 S32C1 16 byte 64x64~1920x1080 pstDst1 S32C1 16 byte 64x64~1920x1080 pstDst2 S32C1 16 byte 64x64~1920x1080 pstDst3 S32C1 16 byte 64x64~1920x1080 -
返回值
返回值 描述 0 成功。 非 0 失败,参见错误码。 -
依赖
-
头文件:mi_comm_ive.h、mi_ive.h、mi_ive.h
-
库文件:libive.a
-
-
注意
下方为计算图解示意图

每一个输入源的元素都是由16个整数,15个小数和1个符号所组成的。
每一个矩阵的元素都是由1个整数,14个小数和1个符号所组成的。
注 : 若是Pudding系列芯片时,每一个矩阵的元素都是由1个整数,14个小数和1个符号所组成的。
1.44. MI_IVE_Image_Dot¶
-
功能
执行图像点乘积任务。
-
语法
MI_S32 MI_IVE_ Image_Dot (MI_IVE_HANDLE hHandle, MI_IVE_SrcImage_t *pstSrc1, MI_IVE_SrcImage_t *pstSrc2, MI_IVE_DstImage_t *pstDst, MI_BOOL bInstant); -
形参
参数名称 描述 输入/输出 hHandle 区域句柄号。 取值范围:[0, MI_IVE_HANDLE_MAX)。 输入 pstSrc1 源图像指针。不能为空。 输入 pstSrc2 源图像指针。不能为空。 输入 pstDst 输t出图像指针。不能为空。 输出 bInstant 保留。 输入 参数名称 支持图像类型 地址对齐 分辨率 pstSrc1 S32C1 16 byte 64x64~1920x1080 pstSrc2 S32C1 16 byte 64x64~1920x1080 pstDst S32C1 16 byte 64x64~1920x1080 -
返回值
返回值 描述 0 成功。 非 0 失败,参见错误码。 -
依赖
-
头文件:mi_comm_ive.h、mi_ive.h、mi_ive.h
-
库文件:libive.a
-
-
注意
计算公式如下
I_{\text{out}} = I_{src1}(x,y) \times I_{src2}(x,y)每一个输入源的元素都是由16个整数,15个小数和1个符号所组成的。
1.45. MI_IVE_Shift_Detector¶
- 功能
执行图像区域追踪任务。
-
语法
MI_S32 MI_IVE_Shift_Detector(MI_IVE_HANDLE hHandle, MI_IVE_SrcImage_t *pstSrc1, MI_IVE_SrcImage_t *pstSrc2, MI_IVE_DstImage_t *pstDstX, MI_IVE_DstImage_t *pstDstY, MI_IVE_SHIFT_DETECT_CTRL_t *pstCtrl, MI_BOOL bInstant); -
形参
参数名称 描述 输入/输出 hHandle 区域句柄号。
取值范围:[0, MI_IVE_HANDLE_MAX)。输入 pstSrc1 源图像指针。不能为空。 输入 pstSrc2 源图像指针。不能为空。 输入 pstDstX 输t出图像指针。不能为空。 输出 pstDstY 输t出图像指针。不能为空。 输出 pstCtrl 控制信息指针。不能为空。 输入 bInstant 保留。 输入 参数名称 支持图像类型 地址对齐 分辨率 pstSrc1 U8C1 16 byte 64x64~1920x1080 pstSrc2 U8C1 16 byte 64x64~1920x1080 pstDstX U16C1 16 byte 64x64~1920x1080 pstDstY U16C1 16 byte 64x64~1920x1080 -
返回值
返回值 描述 0 成功。 非 0 失败,参见错误码。 -
依赖
-
头文件:mi_comm_ive.h、mi_ive.h、mi_ive.h
-
库文件:libive.a
-
-
注意
输入两张相同场景不同时间序列之图像(Tk, Tk+1),透过控制信息指针输入Tk的目标区域位置,即可输出目标区域在Tk+1下的追踪结果。
若 enMode = E_MI_IVE_SHIFT_DETECT_MODE_MULTI, shift detector 会将图像划分为MxN个方块区域(方块大小为u16Width x u16Height),并针对每个方块区域内物体进行追踪。 若 enMode = E_MI_IVE_SHIFT_DETECT_MODE_SINGLE, shift detector则会针对单一物体进行追踪。
1.46. MI_IVE_AlphaBlending¶
-
功能
执行图像个别权重乘积任务。
-
语法
MI_S32 MI_IVE_AlphaBlending (MI_IVE_HANDLE hHandle, MI_IVE_SrcImage_t *pstSrc1, MI_IVE_SrcImage_t *pstSrc2, MI_IVE_SrcImage_t *pstAlpha, MI_IVE_DstImage_t *pstDst, MI_BOOL bInstant); -
形参
参数名称 描述 输入/输出 hHandle 区域句柄号。
取值范围:[0, MI_IVE_HANDLE_MAX)。输入 pstSrc1 源图像指针。不能为空。 输入 pstSrc2 源图像指针。不能为空。 输入 pstAlpha 源权重指针。不能为空。 输入 pstDst 输t出图像指针。不能为空。 输出 bInstant 保留。 输入 参数名称 支持图像类型 地址对齐 分辨率 pstSrc1 U8C1 16 byte 64x64~1920x1080 pstSrc2 U8C1 16 byte 64x64~1920x1080 pstAlpha U8C1 16 byte 64x64~1920x1080 pstDst U8C1 16 byte 64x64~1920x1080 -
返回值
返回值 描述 0 成功。 非 0 失败,参见错误码。 -
依赖
-
头文件:mi_comm_ive.h、mi_ive.h、mi_ive.h
-
库文件:libive.a
-
-
注意
计算公式如下:
I_{out}=I_{Src1}(x,y)\times I_{Alpha}(x,y)+I_{Src2}(x,y)\times (1-I_{Alpha(x,y)})
2. IVE 数据类型¶
2.1. 数据类型定义¶
IVE 相关数据类型、数据结构定义如下:
2.2. 定点数据类型¶
-
说明
定义定点化的数据类型。
-
定义
typedef unsigned char MI_U0Q8; typedef unsigned char MI_U1Q7; typedef unsigned char MI_U5Q3; typedef unsigned short MI_U0Q16; typedef unsigned short MI_U4Q12; typedef unsigned short MI_U6Q10; typedef unsigned short MI_U8Q8; typedef unsigned short MI_U14Q2; typedef unsigned short MI_U12Q4; typedef short MI_S14Q2; typedef short MI_S9Q7; typedef unsigned int MI_U22Q10; typedef unsigned int MI_U25Q7; typedef int MI_S25Q7; typedef unsigned short MI_U8Q4F4; /*8bits unsigned integer, 4bits decimal fraction, 4bits flag bits*/
-
成员
成员名称 描述 MI_U0Q8 用 0bit 表示整数部分,8bit 表示小数部分。文档中用 UQ0.8 来表示。 MI_U1Q7 用高 1bit 无符号数据表示整数部分,低 7bit 表示小数部分。文档中用 UQ1.7 来表示。 MI_U5Q3 用高 5bit 无符号数据表示整数部分,低 3bit 表示小数部分。文档中用 UQ5.3 来表示。 MI_U0Q16 用 0bit 表示整数部分,16bit 表示小数部分。文档中用 UQ0.16 来表示。 MI_U4Q12 用高 4bit 无符号数据表示整数部分,低 12bit 表示小数部分。文档中用 UQ4.12 来表示。 MI_U6Q10 用高 6bit 无符号数据表示整数部分,低 10bit 表示小数部分。文档中用 UQ6.10 来表示。 MI_U8Q8 用高 8bit 无符号数据表示整数部分,低 8bit 表示小数部分。文档中用 UQ8.8 来表示。 MI_U14Q2 用高 14bit 无符号数据表示整数部分,低 2bit 表示小数部分。文档中用 UQ14.2 来表示。 MI_U12Q4 用高 12bit 无符号数据表示整数部分,低 4bit 表示小数部分。文档中用 UQ12.4 来表示。 MI_S14Q2 用高 14bit 有符号数据表示整数部分,低 2bit 表示小数部分。文档中用 SQ14.2 来表示。 MI_S9Q7 用高 9bit 有符号数据表示整数部分,低 7bit 表示小数部分。文档中用 SQ9.7 来表示。 MI_U22Q10 用高 22bit 无符号数据表示整数部分,低 10bit 表示小数部分。文档中用 UQ22.10 来表示。 MI_U25Q7 用高 25bit 无符号数据表示整数部分,低 7bit 表示小数部分。文档中用 UQ25.7 来表示。 MI_S25Q7 用高 25bit 有符号数据表示整数部分,低 7bit 表示小数部分。文档中用 SQ25.7 来表示。 MI_U8Q4F4 用高 8bit 无符号数据表示整数部分,中间 4bit 表示小数部分,低 4bit 表示标志位。文档中用 UQF8.4.4 来表示。 -
注意事项
MI_UxQyFz\MI_SxQy:
-
U 后面的数字 x 表示是用 x bit 无符号数据表示整数部分;
-
S 后面的数字 x 表示用x bit 有符号数据表示整数部分;
-
Q 后面的数字 y 表示用 y bit 数据表示小数部分;
-
F 后面的数字 z 表示用 z bit 来表示标志位;
-
从左到右依次表示高 bit 位到低 bit 位。
-
2.3. MI_IVE_HIST_NUM¶
-
说明
定义直方图统计 bin 数目。
-
定义
#define MI_IVE_HIST_NUM 256
2.4. MI_IVE_MAP_NUM¶
-
说明
定义映射查找表项数目。
-
定义
#define MI_IVE_MAP_NUM 256
2.5. MI_IVE_MAX_REGION_NUM¶
-
说明
定义最大连通区域数目。
-
定义
#define MI_IVE_MAX_REGION_NUM 255
2.6. MI_IVE_ST_MAX_CORNER_NUM¶
-
说明
定义 Shi-Tomasi-like 角点最大数目。
-
定义
#define MI_IVE_ST_MAX_CORNER_NUM 200
2.7. MI_IVE_MASK_SIZE_5X5¶
-
说明
定义 Mask size。
-
定义
#define MI_IVE_MASK_SIZE_5X5 25
2.8. MI_IVE_CANNY_STACK_RESERVED_SIZE¶
-
说明
定义 Canny Stack Reserved Size。
-
定义
#define MI_IVE_CANNY_STACK_RESERVED_SIZE 12
2.9. MI_IVE_ImageType_e¶
-
说明
定义二维广义图像支持的图像类型。
-
定义
typedef enum { E_MI_IVE_IMAGE_TYPE_U8C1 =0x0, E_MI_IVE_IMAGE_TYPE_S8C1 =0x1, E_MI_IVE_IMAGE_TYPE_YUV420SP =0x2, /*YUV420 SemiPlanar*/ E_MI_IVE_IMAGE_TYPE_YUV422SP =0x3, /*YUV422 SemiPlanar*/ E_MI_IVE_IMAGE_TYPE_YUV420P =0x4, /*YUV420 Planar*/ E_MI_IVE_IMAGE_TYPE_YUV422P =0x5, /*YUV422 planar*/ E_MI_IVE_IMAGE_TYPE_S8C2_PACKAGE =0x6, E_MI_IVE_IMAGE_TYPE_S8C2_PLANAR =0x7, E_MI_IVE_IMAGE_TYPE_S16C1 =0x8, E_MI_IVE_IMAGE_TYPE_U16C1 =0x9, E_MI_IVE_IMAGE_TYPE_U8C3_PACKAGE =0xa, E_MI_IVE_IMAGE_TYPE_U8C3_PLANAR =0xb, E_MI_IVE_IMAGE_TYPE_S32C1 =0xc, E_MI_IVE_IMAGE_TYPE_U32C1 =0xd, E_MI_IVE_IMAGE_TYPE_S64C1 =0xe, E_MI_IVE_IMAGE_TYPE_U64C1 =0xf, E_MI_IVE_IMAGE_TYPE_BUTT }MI_IVE_ImageType_e;
-
成员
成员名称 描述 E_MI_IVE_IMAGE_TYPE_U8C1 每个像素用 1 个 8bit 无符号数据表示的单通道图像。 E_MI_IVE_IMAGE_TYPE_S8C1 每个像素用 1 个 8bit 有符号数据表示的单通道图像。 E_MI_IVE_IMAGE_TYPE_YUV420SP YUV420 Semiplanar 格式的图像。 E_MI_IVE_IMAGE_TYPE_YUV422SP YUV422 Semiplanar 格式的图像。 E_MI_IVE_IMAGE_TYPE_YUV420P YUV420 Planar 格式的图像。 E_MI_IVE_IMAGE_TYPE_YUV422P YUV422 Planar 格式的图像。 E_MI_IVE_IMAGE_TYPE_S8C2_PACKA GE 每个像素用 2 个 8bit 有符号数据表示,且以 package 格式存储 2 通道图像。 E_MI_IVE_IMAGE_TYPE_S8C2_PLANA R 每个像素用 2 个 8bit 有符号数据表示,且以planar 格式存储 2 通道图像。 E_MI_IVE_IMAGE_TYPE_S16C1 每个像素用 1 个 16bit 有符号数据表示单通道图像。 E_MI_IVE_IMAGE_TYPE_U16C1 每个像素用 1 个 16bit 无符号数据表示单通道图像。 E_MI_IVE_IMAGE_TYPE_U8C3_PACK AGE 每个像素用 3 个 8bit 无符号数据表示且以 planar 格式存储 3 通道图像。 E_MI_IVE_IMAGE_TYPE_U8C3_PLAN AR 每个像素用 3 个 8bit 无符号数据表示 1 个像素的 3 通道图像,且以 planar 格式存储。 E_MI_IVE_IMAGE_TYPE_S32C1 每个像素用 1 个 32bit 有符号数据表示单通道图像。 E_MI_IVE_IMAGE_TYPE_U32C1 每个像素用 1 个 32bit 无符号数据表示单通道图像。 E_MI_IVE_IMAGE_TYPE_S64C1 每个像素用 1 个 64bit 有符号数据表示单通道图像。 E_MI_IVE_IMAGE_TYPE_U64C1 每个像素用 1 个 64bit 无符号数据表示单通道图像。 -
注意:
-
E_MI_IVE_IMAGE_TYPE_U8C1、E_MI_IVE_IMAGE_TYPE_S8C1、E_MI_IVE_IMAGE_TYPE_YUV420SP、E_MI_IVE_IMAGE_TYPE_S16C1、E_MI_IVE_IMAGE_TYPE_U16C1、E_MI_IVE_IMAGE_TYPE_S32C1、E_MI_IVE_IMAGE_TYPE_U32C1、E_MI_IVE_IMAGE_TYPE_S64C1、E_MI_IVE_IMAGE_TYPE_U64C1 RGB存储时单独存R或者G或者B
-
E_MI_IVE_IMAGE_TYPE_S8C2_PACKAGE 、E_MI_IVE_IMAGE_TYPE_U8C3_PACKAGE RGB存储时存储顺序如RGBRGBRGB...
-
E_MI_IVE_IMAGE_TYPE_S8C2_PLANAR、E_MI_IVE_IMAGE_TYPE_U8C3_PLANAR RGB存储时R存一块,G存一块,B存一块(如RRR...GGG...BBB...)
-
-
相关数据类型及接口
2.10. MI_IVE_Image_t¶
-
说明
定义二维广义图像信息。
-
定义
typedef struct MI_IVE_Image_s { eType; MI_PHY aphyPhyAddr[3]; MI_U8 *apu8VirAddr[3]; MI_U16 au16Stride[3]; MI_U16 u16Width; MI_U16 u16Height; MI_U16 u16Reserved; /*Can be used such as elemSize*/ }MI_IVE_Image_t;
-
成员
成员名称 描述 enType 广义图像的图像类型。 aphyPhyAddr[3] 广义图像的物理地址数组。 apu8VirAddr[3] 广义图像的虚拟地址数组。 au16Stride[3] 广义图像的跨度。 u16Width 广义图像的宽度。 u16Height 广义图像的高度。 u16Reserved 保留位。 -
注意事项
-
不同的算子对图像图像的输入输出地址是否对齐有不同的要求。
-
u16Width、u16Height 和u16Stride 均是以像素为度量单位的。
-
-
相关数据类型及接口
2.11. MI_IVE_SrcImage_t¶
-
说明
定义源图像。
-
定义
typedef MI_IVE_Image_t MI_IVE_SrcImage_t; -
相关数据类型及接口
2.12. MI_IVE_DstImage_t¶
-
说明
定义输出图像。
-
定义
typedef MI_IVE_Image_t MI_IVE_DstImage_t; -
相关数据类型及接口
2.13. MI_IVE_Data_t¶
-
说明
定义以 byte 为单位的二维数据信息。
-
定义
typedef struct MI_IVE_Data_s { MI_PHY phyPhyAddr; /*Physical address of the data*/ MI_U8 *pu8VirAddr; MI_U16 u16Stride; /*Data stride by byte*/ MI_U16 u16Height; /*Data height by byte*/ MI_U16 u16Width; /*Data width by byte*/ MI_U16 u16Reserved; }MI_IVE_Data_t;
-
成员
成员名称 描述 phyPhyAddr 图像物理地址。 pu8VirAddr 图像虚拟地址。 u16Stride 图像跨度。 u16Height 图像宽度。 u16Width 图像高度。 u16Reserved 保留位。 -
注意事项
表示以 byte 为单位的二维数据;可以与 图像进行转换。
2.14. MI_IVE_SrcData_t¶
-
说明
定义以 byte 为单位的二维源数据信息。
-
定义
typedef MI_IVE_Data_t MI_IVE_SrcData_t; -
相关数据类型及接口
2.15. MI_IVE_DstData_t¶
-
说明
定义 byte 为单位的二维输出数据信息。
-
定义
typedef MI_IVE_Data_t MI_IVE_DstData_t; -
相关数据类型及接口
2.16. MI_IVE_MemInfo_t¶
-
说明
定义一维数据内存信息。
-
定义
typedef struct MI_IVE_MemInfo_s { MI_PHY phyPhyAddr; MI_U8 *pu8VirAddr; MI_U32 u32Size; }MI_IVE_MemInfo_t;
-
成员
成员名称 描述 phyPhyAddr 一维数据物理地址。 pu8VirAddr 一维数据虚拟地址。 u32Size 一维数据 byte 数目。 -
相关数据类型及接口
2.17. MI_IVE_SrcMemInfo_t¶
-
说明
定义一维源数据。
-
定义
typedef MI_IVE_MemInfo_t MI_IVE_SrcMemInfo_t; -
相关数据类型及接口
2.18. MI_IVE_DstMemInfo_t¶
-
说明
定义一维输出数据。
-
定义
typedef MI_IVE_MemInfo_t MI_IVE_DstMemInfo_t; -
相关数据类型及接口
2.19. MI_IVE_Length8bit_u¶
-
说明
定义 8bit 数据联合体。
-
定义
typedef union { MI_S8 s8Val; MI_U8 u8Val; } MI_IVE_Length8bit_u;
-
成员
成员名称 描述 s8Val 有符号 8bit 值。 u8Val 无符号 8bit 值。
2.20. MI_IVE_PointU16_t¶
-
说明
定义 U16 表示的点信息结构体。
-
定义
typedef struct MI_IVE_PointU16_s { MI_U16 u16X; MI_U16 u16Y; }MI_IVE_PointU16_t;
-
成员
成员名称 描述 u16X 点的 x 坐标。 u16Y 点的 y 坐标。
2.21. MI_IVE_PointS25Q7_t¶
-
说明
定义 S25Q7 定点表示的点信息结构体。
-
定义
typedef struct MI_IVE_PointS25Q7_s { MI_S25Q7 s25q7X; /*X coordinate*/ MI_S25Q7 s25q7Y; /*Y coordinate*/ }MI_IVE_PointS25Q7_t;
-
成员
成员名称 描述 s25q7X 点的 x 坐标,以 SQ25.7 表示。 s25q7Y 点的 y 坐标,以 SQ25.7 表示。
2.22. MI_IVE_Rect_t¶
-
说明
定义 U16 表示的矩形信息结构体。
-
定义
typedef struct MI_IVE_Rect_s { MI_U16 u16X; MI_U16 u16Y; MI_U16 u16Width; MI_U16 u16Height; }MI_IVE_Rect_t;
-
成员
成员名称 描述 u16X 矩形相对于坐标原点最近点的 x 坐标。 u16Y 矩形相对于坐标原点最近点的 y 坐标。 u16Width 矩形的宽。 u16Height 矩形的高。
2.23. MI_IVE_FilterCtrl_t¶
-
说明
定义模板滤波控制信息。
-
定义
typedef struct MI_IVE_FilterCtrl_s { MI_S8 as8Mask[MI_IVE_MASK_SIZE_5X5]; /*Template parameter filter coefficient*/ MI_U8 u8Norm; /*Normalization parameter, by right shift*/ }MI_IVE_FilterCtrl_t;
-
成员
成员名称 描述 as8Mask[MI_IVE_MASK_SIZE_5X5] 5x5 模板系数,外围系数设为 0 可实现 3x3 模板滤波。 u8Norm 归一化参数。取值范围:[0, 13]。 -
注意事项
通过配置不同的模板系数可以达到不同的滤波效果。
2.24. MI_IVE_CscMode_e¶
-
说明
定义色彩空间转换模式。
-
定义
typedef enum { E_MI_IVE_CSC_MODE_PIC_BT601_YUV2RGB = 0x0, E_MI_IVE_CSC_MODE_PIC_BT601_YUV2BGR = 0x1, E_MI_IVE_CSC_MODE_PIC_BT601_RGB2YUV = 0x2, E_MI_IVE_CSC_MODE_PIC_BT601_BGR2YUV = 0x3, E_MI_IVE_CSC_MODE_MAX }MI_IVE_CscMode_e;
-
成员
成员名称 描述 E_MI_IVE_CSC_MODE_PIC_BT601_YUV2RGB YUV2RGB 的图像变换。 E_MI_IVE_CSC_MODE_PIC_BT601_YUV2BGR YUV2BGR 的图像变换。 E_MI_IVE_CSC_MODE_PIC_BT601_RGB2YUV RGB2YUV 的图像变换。 E_MI_IVE_CSC_MODE_PIC_BT601_BGR2YUV BGR2YUV 的图像变换。 -
注意事项
-
YVE 满足 0≤ Y、U、V ≤255
-
RGB 满足 0≤ R、G、B ≤255。
-
-
相关数据类型及接口
2.25. MI_IVE_CscCtrl_t¶
-
说明
定义色彩空间转换控制信息。
-
定义
typedef struct MI_IVE_CscCtrl_s { enMode; /*Working mode*/ }MI_IVE_CscCtrl_t;
-
成员
成员名称 描述 enMode 工作模式。 -
相关数据类型及接口
2.26. MI_IVE_FilterAndCscCtrl_t¶
-
说明
定义模板滤波加色彩空间转换复合功能控制信息。
-
定义
typedef struct MI_IVE_FilterAndCscCtrl_s { MI_IVE_CscMode_e eMode; /*CSC working mode*/ MI_S8 as8Mask[MI_IVE_MASK_SIZE_5X5]; /*Template parameter filter coefficient*/ MI_U8 u8Norm; /*Normalization parameter, by right shift*/ }MI_IVE_FilterAndCscCtrl_t;
-
成员
成员名称 描述 eMode 工作模式。 as8Mask[MI_IVE_MASK_SIZE_5X5] 5x5 模板系数。 u8Norm 归一化参数。 取值范围:[0, 13]。 -
注意事项
仅支持 YUV2RGB 的 4 种模式。
-
相关数据类型及接口
2.27. MI_IVE_SobelOutCtrl_e¶
-
说明
定义 Sobel 输出控制信息。
-
定义
typedef enum { E_MI_IVE_SOBEL_OUT_CTRL_BOTH = 0x0, /*Output horizontal and vertical*/ E_MI_IVE_SOBEL_OUT_CTRL_HOR = 0x1, /*Output horizontal*/ E_MI_IVE_SOBEL_OUT_CTRL_VER = 0x2, /*Output vertical*/ E_MI_IVE_SOBEL_OUT_CTRL_BUTT }MI_IVE_SobelOutCtrl_e;
-
成员
成员名称 描述 E_MI_IVE_SOBEL_OUT_CTRL_BOTH 同时输出用模板和转置模板滤波的结果。 E_MI_IVE_SOBEL_OUT_CTRL_HOR 仅输出用模板直接滤波的结果。 E_MI_IVE_SOBEL_OUT_CTRL_VER 仅输出用转置模板滤波的结果。 -
相关数据类型及接口
2.28. MI_IVE_SobelCtrl_t¶
-
说明
定义 Sobel-like 梯度计算控制信息。
-
定义
typedef struct MI_IVE_SobelCtrl_s { MI_IVE_SobelOutCtrl_e eOutCtrl; /*Output format*/ MI_S8 as8Mask[MI_IVE_MASK_SIZE_5X5];/*Template parameter*/ }MI_IVE_SobelCtrl_t;
-
成员
成员名称 描述 eOutCtrl 输出控制枚举参数。 as8Mask[MI_IVE_MASK_SIZE_5X5] 5x5 模板系数。 -
相关数据类型及接口
2.29. MI_IVE_MagAndAngOutCtrl_e¶
-
说明
定义梯度幅值与角度计算的输出格式。
-
定义
typedef enum { E_MI_IVE_MAG_AND_ANG_OUT_CTRL_MAG = 0x0, E_MI_IVE_MAG_AND_ANG_OUT_CTRL_MAG_AND_ANG = 0x1, E_MI_IVE_MAG_AND_ANG_OUT_CTRL_BUTT }MI_IVE_MagAndAngOutCtrl_e;
-
成员
成员名称 描述 E_MI_IVE_MAG_AND_ANG_OUT_CTRL_MAG 仅输出幅值。 E_MI_IVE_MAG_AND_ANG_OUT_CTRL_MAG_AND_ANG 同时输出幅值和角度值。 -
相关数据类型及接口
2.30. MI_IVE_MagAndAngCtrl_t¶
-
说明
定义梯度幅值和幅角计算的控制信息。
-
定义
typedef struct MI_IVE_MagAndAngCtrl_s { MI_IVE_MagAndAngOutCtrl_e eOutCtrl; MI_U16 u16Thr; MI_S8 as8Mask[MI_IVE_MASK_SIZE_5X5]; /*Template parameter.*/ }MI_IVE_MagAndAngCtrl_t;
-
成员
成员名称 描述 eOutCtrl 输出格式。 u16Thr 用于对幅值进行阈值化的阈值。 as8Mask[MI_IVE_MASK_SIZE_5X5] 5x5 模板系数。 -
相关数据类型及接口
2.31. MI_IVE_DilateCtrl_t¶
-
说明
定义膨胀控制信息。
-
定义
typedef struct MI_IVE_DilateCtrl_s { MI_U8 au8Mask[MI_IVE_MASK_SIZE_5X5]; /*The template parameter value must be 0 or 255.*/ }MI_IVE_DilateCtrl_t;
-
成员
成员名称 描述 au8Mask[MI_IVE_MASK_SIZE_5X5] 5x5 模板系数。取值范围:0 或 255。
2.32. MI_IVE_ErodeCtrl_t¶
-
说明
定义腐蚀控制信息。
-
定义
typedef struct MI_IVE_ErodeCtrl_s { MI_U8 au8Mask[MI_IVE_MASK_SIZE_5X5]; /*The template parameter value must be 0 or 255.*/ }MI_IVE_ErodeCtrl_t;
-
成员
成员名称 描述 au8Mask[MI_IVE_MASK_SIZE_5X5] 5x5 模板系数。取值范围:0 或 255。
2.33. MI_IVE_ThreshMode_e¶
-
说明
定义图像二值化输出格式。
-
定义
typedef enum { E_MI_IVE_THRESH_MODE_BINARY = 0x0, /*srcVal <= lowThr, dstVal = minVal; srcVal > lowThr, dstVal = maxVal.*/ E_MI_IVE_THRESH_MODE_TRUNC = 0x1, /*srcVal <= lowThr, dstVal = srcVal; srcVal > lowThr, dstVal = maxVal.*/ E_MI_IVE_THRESH_MODE_TO_MINVAL = 0x2, /*srcVal <= lowThr, dstVal = minVal; srcVal > lowThr, dstVal = srcVal.*/ E_MI_IVE_THRESH_MODE_MIN_MID_MAX = 0x3, /*srcVal <= lowThr, dstVal = minVal; lowThr < srcVal <= highThr, dstVal = midVal; srcVal > highThr, dstVal = maxVal.*/ E_MI_IVE_THRESH_MODE_ORI_MID_MAX = 0x4, /*srcVal <= lowThr, dstVal = srcVal; lowThr < srcVal <= highThr, dstVal = midVal; srcVal > highThr, dstVal = maxVal.*/ E_MI_IVE_THRESH_MODE_MIN_MID_ORI = 0x5, /*srcVal <= lowThr, dstVal = minVal; lowThr < srcVal <= highThr, dstVal = midVal; srcVal > highThr, dstVal = srcVal.*/ E_MI_IVE_THRESH_MODE_MIN_ORI_MAX = 0x6, /*srcVal <= lowThr, dstVal = minVal; lowThr < srcVal <= highThr, dstVal = srcVal; srcVal > highThr, dstVal = maxVal.*/ E_MI_IVE_THRESH_MODE_ORI_MID_ORI = 0x7, /*srcVal <= lowThr, dstVal = srcVal; lowThr < srcVal <= highThr, dstVal = midVal; srcVal > highThr, dstVal = srcVal.*/ E_MI_IVE_THRESH_MODE_BUTT }MI_IVE_ThreshMode_e;
-
成员
成员名称 描述 E_MI_IVE_THRESH_MODE_BINARY srcVal ≤ lowThr, dstVal = minVal; srcVal > lowThr, dstVal = maxVal。 E_MI_IVE_THRESH_MODE_TRUNC srcVal ≤ lowThr, dstVal = srcVal;srcVal > lowThr, dstVal = maxVal。 E_MI_IVE_THRESH_MODE_TO_MINVAL srcVal ≤lowThr, dstVal = minVal; srcVal > lowThr, dstVal = srcVal。 E_MI_IVE_THRESH_MODE_MIN_MID_MAX srcVal ≤ lowThr, dstVal = minVal;lowThr \< srcVal ≤ highThr, dstVal = midVal; srcVal > highThr, dstVal = maxVal。 E_MI_IVE_THRESH_MODE_ORI_MID_MAX srcVal ≤lowThr, dstVal = srcVal; lowThr \< srcVal ≤ highThr, dstVal = midVal; srcVal > highThr, dstVal = maxVal。 E_MI_IVE_THRESH_MODE_MIN_MID_ORI srcVal ≤lowThr, dstVal = minVal; lowThr \< srcVal ≤highThr,dstVal = midVal; srcVal > highThr, dstVal = srcVal。 E_MI_IVE_THRESH_MODE_MIN_ORI_MAX srcVal ≤ lowThr, dstVal = minVal; lowThr \< srcVal ≤ highThr,dstVal = srcVal; srcVal > highThr, dstVal = maxVal。 E_MI_IVE_THRESH_MODE_ORI_MID_ORI srcVal≤ lowThr, dstVal = srcVal;lowThr \< srcVal ≤ highThr, dstVal = midVal; srcVal > highThr, dstVal = srcVal。 -
注意事项
计算公式请参见 MI_IVE_Thresh 中的
注意。 -
相关数据类型及接口
2.34. MI_IVE_ThreshCtrl_t¶
-
说明
定义图像二值化控制信息。
-
定义
typedef struct MI_IVE_ThreshCtrl_s { MI_IVE_ThreshMode_e eMode; MI_U8 u8LowThr; /*user-defined threshold, 0<=u8LowThr<=255 */ MI_U8 u8HighThr; /*user-defined threshold, if eMode<E_MI_IVE_THRESH_MODE_MIN_MID_MAX, u8HighThr is not used, else 0<=u8LowThr<=u8HighThr<=255;*/ MI_U8 u8MinVal; /*Minimum value when tri-level thresholding*/ MI_U8 u8MidVal; /*Middle value when tri-level thresholding, if eMode<2, u32MidVal is not used; */ MI_U8 u8MaxVal; /*Maxmum value when tri-level thresholding*/ }MI_IVE_ThreshCtrl_t;
-
成员
成员名称 描述 eMode 阈值化运算模式。 u8LowThresh 低阈值。 取值范围:[0,255]。 u8HighThresh 高阈值。 0≤u8LowThresh≤u8HighThresh≤255。 u8MinVal 最小值。 取值范围:[0,255]。 u8MidVal 中间值。 取值范围:[0,255]。 u8MaxVal 最大值。 取值范围:[0,255]。 -
相关数据类型及接口
2.35. MI_IVE_SubMode_e¶
-
说明
定义两图像相减输出格式。
-
定义
typedef enum { E_MI_IVE_SUB_MODE_ABS = 0x0, /*Absolute value of the difference*/ E_MI_IVE_SUB_MODE_SHIFT = 0x1, /*The output result is obtained by shifting the result one digit right to reserve the signed bit.*/ E_MI_IVE_SUB_MODE_BUTT }MI_IVE_SubMode_e;
-
成员
成员名称 描述 E_MI_IVE_SUB_MODE_ABS 取差的绝对值。 E_MI_IVE_SUB_MODE_SHIFT 将结果右移一位输出,保留符号位。 -
相关数据类型及接口
2.36. MI_IVE_SubCtrl_t¶
-
说明
定义两图像相减控制参数。
-
定义
typedef struct MI_IVE_SubCtrl_s { MI_IVE_SubMode_e eMode; }MI_IVE_SubCtrl_t;
-
成员
成员名称 描述 eMode 两图像相减模式 -
相关数据类型及接口
2.37. MI_IVE_IntegOutCtrl_e¶
-
说明
定义积分图输出控制参数。
-
定义
typedef enum { E_MI_IVE_INTEG_OUT_CTRL_COMBINE = 0x0, E_MI_IVE_INTEG_OUT_CTRL_SUM = 0x1, E_MI_IVE_INTEG_OUT_CTRL_SQSUM = 0x2, E_MI_IVE_INTEG_OUT_CTRL_BUTT }MI_IVE_IntegOutCtrl_e;
-
成员
成员名称 描述 E_MI_IVE_INTEG_OUT_CTRL_COMBINE 和、平方和积分图组合输出。 E_MI_IVE_INTEG_OUT_CTRL_SUM 仅和积分图输出。 E_MI_IVE_INTEG_OUT_CTRL_SQSUM 仅平方和积分图输出。 -
相关数据类型及接口
2.38. MI_IVE_IntegCtrl_t¶
-
说明
定义积分图计算控制参数。
-
定义
typedef struct MI_IVE_IntegCtrl_s { MI_IVE_IntegOutCtrl_e eOutCtrl; }MI_IVE_IntegCtrl_t;
-
成员
成员名称 描述 eOutCtrl 积分图输出控制参数 -
相关数据类型及接口
2.39. MI_IVE_ThreshS16Mode_e¶
-
说明
定义 16bit 有符号图像的阈值化模式。
-
定义
typedef enum { E_MI_IVE_THRESH_S16_MODE_S16_TO_S8_MIN_MID_MAX = 0x0, E_MI_IVE_THRESH_S16_MODE_S16_TO_S8_MIN_ORI_MAX = 0x1, E_MI_IVE_THRESH_S16_MODE_S16_TO_U8_MIN_MID_MAX = 0x2, E_MI_IVE_THRESH_S16_MODE_S16_TO_U8_MIN_ORI_MAX = 0x3, E_MI_IVE_THRESH_S16_MODE_BUTT }MI_IVE_ThreshS16Mode_e;
-
成员
成员名称 描述 E_MI_IVE_THRESH_S16_MODE_S16_ TO_S8_MIN_MID_MAX srcVal ≤ lowThr, dstVal = minVal; lowThr \< srcVal ≤highThr, dstVal = idVal; srcVal > highThr, dstVal = maxVal; E_MI_IVE_THRESH_S16_MODE_S16_ TO_S8_MIN_ORI_MAX srcVal ≤ lowThr, dstVal = minVal;lowThr \< srcVal ≤highThr, dstVal = rcVal; srcVal > highThr, dstVal = maxVal; E_MI_IVE_THRESH_S16_MODE_S16_ TO_U8_MIN_MID_MAX srcVal ≤ lowThr, dstVal = minVal; lowThr \< srcVal ≤highThr, dstVal = idVal; srcVal > highThr, dstVal = maxVal; E_MI_IVE_THRESH_S16_MODE_S16_ TO_U8_MIN_ORI_MAX srcVal ≤ lowThr, dstVal = minVal; lowThr \< srcVal ≤highThr, dstVal = rcVal; srcVal > highThr, dstVal = maxVal; -
注意事项
计算公式请参见MI_IVE_ThreshS16 中的
注意。 -
相关数据类型及接口
2.40. MI_IVE_ThreshS16Ctrl_t¶
-
说明
定义 16bit 有符号图像的阈值化控制参数。
-
定义
typedef struct MI_IVE_ThreshS16Ctrl_s { MI_IVE_ThreshS16Mode_e eMode; MI_S16 s16LowThr; /*user-defined threshold*/ MI_S16 s16HighThr; /*user-defined threshold*/ MI_IVE_Length8bit_u un8MinVal; /*Minimum value when tri-level thresholding*/ MI_IVE_Length8bit_u un8MidVal; /*Middle value when tri-level thresholding*/ MI_IVE_Length8bit_u un8MaxVal; /*Maxmum value when tri-level thresholding*/ }MI_IVE_ThreshS16Ctrl_t;
-
成员
成员名称 描述 eMode 阈值化运算模式。 s16LowThr 低阈值。 s16HighThr 高阈值。 un8MinVal 最小值。 un8MidVal 中间值。 un8MaxVal 最大值。 -
注意事项
计算公式请参见 MI_IVE_ThreshS16 中的
注意。 -
相关数据类型及接口
2.41. MI_IVE_ThreshU16Mode_e¶
-
说明
定义 16bti 无符号图像的阈值化模式。
-
定义
typedef enum { E_MI_IVE_THRESH_U16_MODE_U16_TO_U8_MIN_MID_MAX = 0x0, E_MI_IVE_THRESH_U16_MODE_U16_TO_U8_MIN_ORI_MAX = 0x1, E_MI_IVE_THRESH_U16_MODE_BUTT }MI_IVE_ThreshU16Mode_e;
-
成员
成员名称 描述 E_MI_IVE_THRESH_U16_MODE_U16_ TO_U8_MIN_MID_MAX srcVal ≤ lowThr, dstVal = minVal; lowThr \< srcVal ≤highThr, dstVal = midVal; srcVal > highThr, dstVal = maxVal; E_MI_IVE_THRESH_U16_MODE_U16_ TO_U8_MIN_ORI_MAX srcVal ≤ lowThr, dstVal = minVal; lowThr \< srcVal ≤highThr, dstVal = srcVal; srcVal > highThr, dstVal = maxVal; -
注意事项
计算公式请参见 MI_IVE_ThreshU16 中的
注意。 -
相关数据类型及接口
2.42. MI_IVE_ThreshU16Ctrl_t¶
-
说明
定义 16bit 无符号图像的阈值化控制参数。
-
定义
typedef struct MI_IVE_ThreshU16Ctrl_s { MI_IVE_ThreshU16Mode_e eMode; MI_U16 u16LowThr; MI_U16 u16HighThr; MI_U8 u8MinVal; MI_U8 u8MidVal; MI_U8 u8MaxVal; }MI_IVE_ThreshU16Ctrl_t;
-
成员
成员名称 描述 eMode 阈值化运算模式。 u16LowThr 低阈值。 u16HighThr 高阈值。 u8MinVal 最小值。 取值范围:[0,255]。 u8MidVal 中间值。 取值范围:[0,255]。 u8MaxVal 最大值。 取值范围:[0,255]。 -
注意事项
计算公式请参见 MI_IVE_ThreshU16中的
注意。 -
相关数据类型及接口
2.43. MI_IVE_16BitTo8BitMode_e¶
-
说明
定义 16bit 图像数据到 8bit 图像数据的的转化模式。
-
定义
typedef enum { E_MI_IVE_16BIT_TO_8BIT_MODE_S16_TO_S8 = 0x0, E_MI_IVE_16BIT_TO_8BIT_MODE_S16_TO_U8_ABS = 0x1, E_MI_IVE_16BIT_TO_8BIT_MODE_S16_TO_U8_BIAS = 0x2, E_MI_IVE_16BIT_TO_8BIT_MODE_U16_TO_U8 = 0x3, E_MI_IVE_16BIT_TO_8BIT_MODE_BUTT }MI_IVE_16BitTo8BitMode_e;
-
成员
成员名称 描述 E_MI_IVE_16BIT_TO_8BIT_MODE_S16_TO_S8 S16 数据到 S8 数据的线性变换。 E_MI_IVE_16BIT_TO_8BIT_MODE_S16_TO_U8_ABS S16 数据线性变换到 S8 数据后取绝对值得到 S8 数据。 E_MI_IVE_16BIT_TO_8BIT_MODE_S16_TO_U8_BIAS S16 数据线性变换到 S8 数据且平移后截断到 U8 数据。 E_MI_IVE_16BIT_TO_8BIT_MODE_U16_TO_U8 S16 数据线性变换到 U8 数据。 -
注意事项
计算公式请参见 MI_IVE_16BitTo8Bit 中的
注意。 -
相关数据类型及接口
2.44. MI_IVE_16bitTo8BitCtrl_t¶
-
说明
定义 16bit 图像数据到 8bit 图像数据的转化控制参数。
-
定义
typedef struct MI_IVE_16bitTo8BitCtrl_s { MI_IVE_16BitTo8BitMode_e eMode; MI_U16 u16Denominator; MI_U8 u8Numerator; MI_S8 s8Bias; }MI_IVE_16bitTo8BitCtrl_t;
-
成员
成员名称 描述 eMode 16bit 数据到 8bit 数据的转换模式。 u16Denominator 线性变换中的分母。取值范围:[max{1,u8Numerator}, 65535] u8Numerator 线性变换中的分子。取值范围:[0,255]。 s8Bias 线性变换中的平移项。取值范围:[-128,127]。 -
注意事项
-
计算公式请参见 MI_IVE_ThreshU16中的
注意。 -
u8Numerator ≤u16Denominator,且 u16Denominator≠0;
-
-
相关数据类型及接口
2.45. MI_IVE_OrdStatFilterMode_e¶
-
说明
定义顺序统计量滤波模式。
-
定义
typedef enum { E_MI_IVE_ORD_STAT_FILTER_MODE_MEDIAN = 0x0, E_MI_IVE_ORD_STAT_FILTER_MODE_MAX = 0x1, E_MI_IVE_ORD_STAT_FILTER_MODE_MIN = 0x2, E_MI_IVE_ORD_STAT_FILTER_MODE_BUTT }MI_IVE_OrdStatFilterMode_e;
-
成员
成员名称 描述 E_MI_IVE_ORD_STAT_FILTER_MODE_MEDIAN 中值滤波。 E_MI_IVE_ORD_STAT_FILTER_MODE_MAX 最大值滤波,等价于灰度图的膨胀。 E_MI_IVE_ORD_STAT_FILTER_MODE_MIN 最小值滤波,等价于灰度图的腐蚀。 -
相关数据类型及接口
2.46. MI_IVE_OrdStatFilter_t¶
-
说明
定义顺序统计量滤波控制参数。
-
定义
typedef struct MI_IVE_OrdStatFilter_s { MI_IVE_OrdStatFilterMode_e eMode; }MI_IVE_OrdStatFilter_t;
-
成员
成员名称 描述 eMode 顺序统计量滤波模式 -
相关数据类型及接口
2.47. MI_IVE_MapLutMem_t¶
-
说明
定义 Map 算子的查找表内存信息。
-
定义
typedef struct MI_IVE_MapLutMem_s { MI_U8 au8Map[MI_IVE_MAP_NUM]; }MI_IVE_MapLutMem_t;
-
成员
成员名称 描述 au8Map[MI_IVE_MAP_NUM] Map 查找表数组。
2.48. MI_IVE_EqualizeHistCtrlMem_t¶
-
说明
定义直方图均衡化辅助内存。
-
定义
typedef struct MI_IVE_EqualizeHistCtrlMem_s { MI_U32 au32Hist[MI_IVE_HIST_NUM]; MI_U8 au8Map[MI_IVE_MAP_NUM]; }MI_IVE_EqualizeHistCtrlMem_t;
-
成员
成员名称 描述 au32Hist[MI_IVE_HIST_NUM] 直方图统计的输出。 au8Map[MI_IVE_MAP_NUM] 根据统计直方图计算得到的 map 查找表。 -
相关数据类型及接口
2.49. MI_IVE_EqualizeHistCtrl_t¶
-
说明
定义直方图均衡化控制参数。
-
定义
typedef struct MI_IVE_EqualizeHistCtrl_s { MI_IVE_MemInfo_t stMem; }MI_IVE_EqualizeHistCtrl_t;
-
成员
成员名称 描述 stMem 需开辟 sizeof(MI_IVE_EqualizeHistCtrlMem_t)字节大小的内存。 -
相关数据类型及接口
2.50. MI_IVE_AddMode_e¶
-
说明
定义 add 计算模式。
-
定义
typedef enum { E_MI_IVE_ADD_MODE_ROUNDING = 0x0, E_MI_IVE_ADD_MOD_CLIPPING = 0x1, E_MI_IVE_ADD_MODE_MAX }MI_IVE_AddMode_e;
-
成员
成员名称 描述 E_MI_IVE_ADD_MODE_ROUNDING 四舍五入模式 E_MI_IVE_ADD_MOD_CLIPPING 无条件舍弃模式 -
相关数据类型及接口
2.51. MI_IVE_AddCtrl_t¶
-
说明
定义两图像的加权加控制参数。
-
定义
typedef struct MI_IVE_AddCtrl_s { MI_IVE_AddMode_e eMode; MI_U0Q16 u0q16X; /*x of "xA+yB"*/ MI_U0Q16 u0q16Y; /*y of "xA+yB"*/ }MI_IVE_AddCtrl_t;
-
成员
成员名称 描述 eMode 计算模式 u0q16X 加权加“xA+yB”中的权重“x”。取值范围:[1, 65535]。 u0q16Y 加权加“xA+yB”中的权重“y”。取值范围:{65536 - u0q16X}。 -
相关数据类型及接口
2.52. MI_IVE_NccDstMem_t¶
-
说明
定义 NCC 的输出内存信息。
-
定义
typedef struct MI_IVE_NccDstMem_s { MI_U64 u64Numerator; MI_U64 u64QuadSum1; MI_U64 u64QuadSum2; }MI_IVE_NccDstMem_t;
-
成员
成员名称 描述 u64Numerator NCC 计算公式的分子-- 公式1 u64QuadSum1 NCC 计算公式的分母--根号内部分:公式2 u64QuadSum2 NCC 计算公式的分母--根号内部分:公式3 公式1:
\sum^w_{i=1}\sum^h_{j=1}(I_{src1}(i,j)*I_{src2}(i,j))公式2:
\sum^w_{i=1}\sum^h_{j=1}(I^2_{src1}(i,j))公式3:
\sum^w_{i=1}\sum^h_{j=1}(I^2_{src2}(i,j)) -
注意事项
计算公式请参见MI_IVE_Ncc 中的
注意。
2.53. MI_IVE_Region_t¶
-
说明
定义连通区域信息。
-
定义
typedef struct MI_IVE_Region_s { MI_U32 u32Area; /*Represented by the pixel number*/ MI_U16 u16Left; /*Circumscribed rectangle left border*/ MI_U16 u16Right; /*Circumscribed rectangle right border*/ MI_U16 u16Top; /*Circumscribed rectangle top border*/ MI_U16 u16Bottom; /*Circumscribed rectangle bottom border*/ }MI_IVE_Region_t;
-
成员
成员名称 描述 u32Area 连通区域面积,以连通区域像素数目表示。 u16Left 连通区域外接矩形的最左边坐标。 u16Right 连通区域外接矩形的最右边坐标。 u16Top 连通区域外接矩形的最上面坐标。 u16Bottom 连通区域外接矩形的最下面坐标。 -
相关数据类型及接口
2.54. MI_IVE_CcBlob_t¶
-
说明
定义连通区域标记的输出信息。
-
定义
typedef struct MI_IVE_CcBlob_s { MI_U16 u16CurAreaThr; /*Threshold of the result regions' area*/ MI_S8 s8LabelStatus; /*-1: Labeled failed ; 0: Labeled successfully*/ MI_U8 u8RegionNum; /*Number of valid region, non-continuous stored*/ MI_IVE_Region_t astRegion[MI_IVE_MAX_REGION_NUM]; /*Valid regions with 'u32Area>0' and 'label = ArrayIndex+1'*/ }MI_IVE_CcBlob_t;
-
成员
成员名称 描述 u16CurAreaThr 有效连通区域的面积阈值,astRegion 中面积小于这个阈值的都被置为 0。 s8LabelStatus 连通区域标记是否成功。-1:标记失败; 0:标记成功。 u8RegionNum 有效连通区域个数。 astRegion[MI_IVE_MAX_REGION_NUM] 连通区域信息:有效的连通区域其面积大于 0,对应标记为数组下标加 1。其中索引254记录因pstCclCtrl→u16InitAreaThr 而被删除的连通区域总面积。 -
注意事项
2.55. MI_IVE_CclMode_e¶
-
说明
定义连通区域模式。
-
定义
typedef enum { E_MI_IVE_CCL_MODE_4C = 0x0, /*4-connectivity*/ E_MI_IVE_CCL_MODE_8C = 0x1, /*8-connectivity*/ E_MI_IVE_CCL_MODE_BUTT }MI_IVE_CclMode_e;
-
成员
成员名称 描述 E_MI_IVE_CCL_MODE_4C 4-连通。 E_MI_IVE_CCL_MODE_8C 8-连通。
2.56. MI_IVE_CclCtrl_t¶
-
说明
定义连通区域标记控制参数。
-
定义
typedef struct MI_IVE_CclCtrl_s { MI_U16 u16InitAreaThr; /*Init threshold of region area*/ MI_U16 u16Step; /*Increase area step for once*/ }MI_IVE_CclCtrl_t;
-
成员
成员名称 描述 u16InitAreaThr 初始面积阈值。 取值范围:[0, 65535]。参考取值:4。 u16Step 面积阈值增长步长。取值范围:[1,65535]。参考取值:2。 -
相关数据类型及接口
2.57. MI_IVE_GmmCtrl_t¶
-
说明
定义 GMM 背景建模的控制参数。
-
定义
typedef struct MI_IVE_GmmCtrl_s { MI_U22Q10 u22q10NoiseVar; /*Initial noise Variance*/ MI_U22Q10 u22q10MaxVar; /*Max Variance*/ MI_U22Q10 u22q10MinVar; /*Min Variance*/ MI_U0Q16 u0q16LearnRate; /*Learning rate*/ MI_U0Q16 u0q16BgRatio; /*Background ratio*/ MI_U8Q8 u8q8VarThr; /*Variance Threshold*/ MI_U0Q16 u0q16InitWeight; /*Initial Weight*/ MI_U8 u8ModelNum; /*Model number: 3 or 5*/ }MI_IVE_GmmCtrl_t;
-
成员
成员名称 描述 u22q10NoiseVar 初始噪声方差。
取值范围:[0x1, 0xFFFFFF]。
对灰度的 GMM,对应 OpenCV MOG 中灰度模型中的noiseSigma * noiseSigma。
参考取值:15*15*(1\<\<10)。 对 RGB 的 GMM,对应 OpenCV MOG 中 RGB 模型中的 3 * noiseSigma * noiseSigma。
参考取值:3*15*15*(1\<\<10)。u22q10MaxVar 模型方差的最大值。
取值范围;[0x1, 0xFFFFFF]。
对应 OpenCV MOG2 中 fVarMax。
参考取值:3*4000\<\<10 (RGB),2000\<\<10(灰度)。u22q10MinVar 模型方差的最小值。
取值范围:[0x1, 22q10MaxVar]。
对应 OpenCV MOG2 中 fVarMin。
参考取值:600\<\<10 (RGB),200\<\<10 (灰度)。u0q16LearnRate 学习速率。
取值范围:[1, 65535]。
对应 OpenCV MOG2 中 learningRate。
参考取值: if (frameNum\<500) (1/frameNum)*((1\<\<16)-1); else ((1/500)*((1\<\<16)-1)。u0q16BgRatio 背景比例阈值。
取值范围:[1, 65535]。
对应 OpenCV MOG 中 backgroundRatio。
参考取值:0.8*((1\<\<16)-1)。u8q8VarThr 方差阈值。
取值范围:[1, 65535]。
对应 OpenCV MOG 中 varThreshold,用于决定一个像素是否命中当前模型。
参考取值:6.25*(1\<\<8)。u0q16InitWeight 初始权重。
取值范围:[1, 65535]。
对应 OpenCV MOG 中的 defaultInitialWeight。
参考取值:0.05*((1\<\<16)-1)。u8ModelNum 模型个数。
取值范围:{3,5}。
对应 OpenCV MOG 中 nmixtures。
2.58. MI_IVE_CannyStackSize_t¶
-
说明
定义 Canny 边缘前半部分计算时强边缘点栈大小结构体。
-
定义
typedef struct MI_IVE_CannyStackSize_s { MI_U32 u32StackSize; /*Stack size for output*/ MI_U8 u8Reserved[MI_IVE_CANNY_STACK_RESERVED_SIZE]; /*For 16 byte align*/ }MI_IVE_CannyStackSize_t;
-
成员
成员名称 描述 u32StackSize 栈大小(强边缘点的个数)。 u8Reserved[MI_IVE_CANNY_STACK_RESERVED_SIZE] 保留位。
2.59. MI_IVE_CannyHysEdgeCtrl_t¶
-
说明
定义 Canny 边缘前半部分计算任务的控制参数。
-
定义
typedef struct MI_IVE_CannyHysEdgeCtrl_s { MI_IVE_MemInfo_t stMem; MI_U16 u16LowThr; MI_U16 u16HighThr; MI_S8 as8Mask[MI_IVE_MASK_SIZE_5X5]; } MI_IVE_CannyHysEdgeCtrl_t;
-
成员
成员名称 描述 stMem 辅助内存。内存配置大小说明见MI_IVE_CannyHysEdge 的 注意。u16LowThr 低阈值。 取值范围:[0,255]。 u16HighThr 高阈值。 取值范围:[u16LowThr,255]。 as8Mask[MI_IVE_MASK_SIZE_5X5] 用于计算梯度的参数模板。
2.60. MI_IVE_LbpCmpMode_e¶
-
说明
定义 LBP 计算的比较模式。
-
定义
typedef enum { E_MI_IVE_LBP_CMP_MODE_NORMAL = 0x0, /* P(x)-P(center)>= un8BitThr.s8Val, s(x)=1; else s(x)=0; */ E_MI_IVE_LBP_CMP_MODE_ABS = 0x1, /* abs(P(x)-P(center))>=un8BitThr.u8Val, s(x)=1; else s(x)=0; */ E_MI_IVE_LBP_CMP_MODE_ABS_MUL = 0x2, E_MI_IVE_LBP_CMP_MODE_MAX }MI_IVE_LbpCmpMode_e;
-
成员
成员名称 描述 E_MI_IVE_LBP_CMP_MODE_NORMAL LBP 简单比较模式。 E_MI_IVE_LBP_CMP_MODE_ABS LBP 绝对值比较模式。 E_MI_IVE_LBP_CMP_MODE_MAX LBP 绝对值乘法比较模式 -
注意事项
计算公式参考 MI_IVE_Lbp 中的
注意。 -
相关数据类型及接口
2.61. MI_IVE_LbpChalMode_e¶
-
说明
定义 LBP 输入信道模式。
-
定义
typedef enum { E_MI_IVE_LBP_CHAL_MODE_U8C1 = 0x0, E_MI_IVE_LBP_CHAL_MODE_U8C2 = 0x1, E_MI_IVE_LBP_CHAL_MODE_MAX } MI_IVE_LbpChalMode_e;
-
成员
成员名称 描述 E_MI_IVE_LBP_CHAL_MODE_U8C1 只有单一输入图像模式。 E_MI_IVE_LBP_CHAL_MODE_U8C2 两个输入影像模式。 -
注意事项
计算公式参考 MI_IVE_Lbp 中的
注意。 -
相关数据类型及接口
2.62. MI_IVE_LbpCtrrl_t¶
-
说明
定义 LBP 纹理计算控制参数。
-
定义
typedef struct MI_IVE_LbpCtrrl_s { MI_IVE_LbpCmpMode_e eMode; MI_IVE_Length8bit_u un8BitThr; }MI_IVE_LbpCtrrl_t;
-
成员
成员名称 描述 eMode LBP 比较模式。 un8BitThr LBP 比较阈值。
E_MI_IVE_LBP_CMP_MODE_NORMAL 下的取值范围:[-128,127]。
E_MI_IVE_LBP_CMP_MODE_ABS 下的取值范围:[0,255]。 -
注意事项
计算公式参考 MI_IVE_Lbp 中的
注意。 -
相关数据类型及接口
2.63. MI_IVE_NormGradOutCtrl_e¶
-
说明
定义归一化梯度信息计算任务输出控制枚举类型。
-
定义
typedef enum { E_MI_IVE_NORM_GRAD_OUT_CTRL_HOR_AND_VER = 0x0, E_MI_IVE_NORM_GRAD_OUT_CTRL_HOR = 0x1, E_MI_IVE_NORM_GRAD_OUT_CTRL_VER = 0x2, E_MI_IVE_NORM_GRAD_OUT_CTRL_COMBINE = 0x3, E_MI_IVE_NORM_GRAD_OUT_CTRL_BUTT }MI_IVE_NormGradOutCtrl_e;
-
成员
成员名称 描述 E_MI_IVE_NORM_GRAD_OUT_CTRL_ HOR_AND_VER 同时输出梯度信息的 H、V 分量图(H、V 定义见 MI_ IVE_NormGrad 的 参数)。E_MI_IVE_NORM_GRAD_OUT_CTRL_ HOR 仅输出梯度信息的 H 分量图。 E_MI_IVE_NORM_GRAD_OUT_CTRL_ VER 仅输出梯度信息的 V 分量图。 E_MI_IVE_NORM_GRAD_OUT_CTRL_ COMBINE 输出梯度信息以 package 存储的HV 图。 -
相关数据类型及接口
2.64. MI_IVE_NormGradCtrl_t¶
-
说明
定义归一化梯度信息计算控制参数。
-
定义
typedef struct MI_IVE_NormGradCtrl_s { MI_IVE_NormGradOutCtrl_e eOutCtrl; MI_S8 as8Mask[MI_IVE_MASK_SIZE_5X5]; MI_U8 u8Norm; }MI_IVE_NormGradCtrl_t;
-
成员
成员名称 描述 eOutCtrl 梯度信息输出控制模式。 as8Mask[MI_IVE_MASK_SIZE_5X5] 计算梯度需要的模板。 u8Norm 归一化参数。取值范围:[1,13]。 -
相关数据类型及接口
2.65. MI_IVE_MvS9Q7_t¶
-
说明
定义 LK 光流位移结构体。
-
说明
typedef struct MI_IVE_MvS9Q7_s { MI_S32 s32Status; /*Result of tracking: 0-success; -1-failure*/ MI_S9Q7 s9q7Dx; /*X-direction component of the movement*/ MI_S9Q7 s9q7Dy; /*Y-direction component of the movement*/ }MI_IVE_MvS9Q7_t;
-
成员
成员名称 描述 s32Status 特征点跟踪的状态。
0:成功;
1:失败。s9q7Dx 特征点位移的 x 分量。 s9q7Dy 特征点位移的 y 分量。
2.66. MI_IVE_LkOpticalFlowCtrl_t¶
-
说明
定义 LK 光流计算控制参数。
-
定义
typedef struct MI_IVE_LkOpticalFlowCtrl_s { MI_U16 u16CornerNum; /*Number of the feature points,<200*/ MI_U0Q8 u0q8MinEigThr; /*Minimum eigenvalue threshold*/ MI_U8 u8IterCount; /*Maximum iteration times*/ MI_U0Q8 u0q8Epsilon; /*Threshold of iteration for dx^2 + dy^2 < u0q8Epsilon */ }MI_IVE_LkOpticalFlowCtrl_t;
-
成员
成员名称 描述 u16CornerNum 输入的角点\特征点数目。取值范围:[1,200]。 u0q8MinEigThr 最小特征值阈值。取值范围:[1,255]。 u8IterCount 最大迭代次数。 取值范围:[1,20]。 u0q8Epsilon 迭代收敛条件:dx^2 + dy^2 \< u0q8Epsilon。取值范围:[1,255]。参考取值:2。
2.67. MI_IVE_SadMode_e¶
-
说明
定义 SAD 计算模式。
-
定义
typedef enum { E_MI_IVE_SAD_MODE_MB_4X4 = 0x0, /*4x4*/ E_MI_IVE_SAD_MODE_MB_8X8 = 0x1, /*8x8*/ E_MI_IVE_SAD_MODE_MB_16X16 = 0x2, /*16x16*/ E_MI_IVE_SAD_MODE_BUTT }MI_IVE_SadMode_e;
-
成员
成员名称 描述 E_MI_IVE_SAD_MODE_MB_4X4 按 4x4 像素块计算 SAD。 E_MI_IVE_SAD_MODE_MB_8X8 按 8x8 像素块计算 SAD。 E_MI_IVE_SAD_MODE_MB_16X16 按 16x16 像素块计算 SAD。 -
注意事项
无。
-
相关数据类型及接口
2.68. MI_IVE_SadOutCtrl_e¶
-
说明
定义 SAD 输出控制模式。
-
定义
typedef enum { E_MI_IVE_SAD_OUT_CTRL_16BIT_BOTH = 0x0, /*Output 16 bit sad and thresh*/ E_MI_IVE_SAD_OUT_CTRL_8BIT_BOTH = 0x1, /*Output 8 bit sad and thresh*/ E_MI_IVE_SAD_OUT_CTRL_16BIT_SAD = 0x2, /*Output 16 bit sad*/ E_MI_IVE_SAD_OUT_CTRL_8BIT_SAD = 0x3, /*Output 8 bit sad*/ E_MI_IVE_SAD_OUT_CTRL_THRESH = 0x4, /*Output thresh,16 bits sad */ E_MI_IVE_SAD_OUT_CTRL_BUTT }MI_IVE_SadOutCtrl_e;
-
成员
成员名称 描述 E_MI_IVE_SAD_OUT_CTRL_16BIT_BOTH 16 bit SAD 图和阈值化图输出模式。 E_MI_IVE_SAD_OUT_CTRL_8BIT_BOTH 8 bit SAD 图和阈值化图输出模式。 E_MI_IVE_SAD_OUT_CTRL_16BIT_SAD 16 bit SAD 图输出模式。 E_MI_IVE_SAD_OUT_CTRL_8BIT_SAD 8 bit SAD 图输出模式。 E_MI_IVE_SAD_OUT_CTRL_THRESH 阈值化图输出模式。 -
相关数据类型及接口
2.69. MI_IVE_SadCtrl_t¶
-
说明
定义 SAD 控制参数。
-
定义
typedef struct MI_IVE_SadCtrl_s { MI_IVE_SadMode_e eMode; MI_IVE_SadOutCtrl_e eOutCtrl; MI_U16 u16Thr; /*srcVal <= u16Thr, dstVal = minVal;srcVal > u16Thr, dstVal = maxVal.*/ MI_U8 u8MinVal; /*Min value*/ MI_U8 u8MaxVal; /*Max value*/ }MI_IVE_SadCtrl_t;
-
成员
成员名称 描述 eMode SAD 计算模式。 eOutCtrl SAD 输出控制模式。 u16Thr 对计算的 SAD 图进行阈值化的阈值。 u8MinVal 阈值化不超过 u16Thr 时的取值。 u8MaxVal 阈值化超过 u16Thr 时的取值。 -
相关数据类型及接口
2.70. MI_IVE_BernsenCtrl_t¶
-
说明
定义 Bernsen 控制参数。
-
定义
typedef struct MVE_IVE_BernsenCtrl_s { MI_IVE_BernsenMode_e enMode; MI_U8 u8WinSize; MI_U8 u8MaxVal; } MVE_IVE_BernsenCtrl_t;
-
成员
成员名称 描述 enMode Bernsen 阀值模式。 u8WinSize 窗口大小。范围 : {3, 5} u8MaxVal 模式 MVE_BERNSEN_MODE_THRESH 的门坎值。范围 : [0, 255] -
相关数据类型及接口
2.71. MI_IVE_BernsenMode_e¶
-
说明
定义 Bernsen 阀值模式。
-
定义
typedef enum { E_MI_IVE_BERNSEN_MODE_NORMAL = 0x0, E_MI_IVE_BERNSEN_MODE_THRESH = 0x1, E_MI_IVE_BERNSEN_MODE_MAX } MVE_IVE_BernsenMode_e;
-
成员
成员名称 描述 E_MI_IVE_BERNSEN_MODE_NORMA 简单 Bernsen 阀值模式 E_MI_IVE_BERNSEN_MODE_THRESH 基于全局阀值和本地 Bernsen 阀值的阀值模式 E_MI_IVE_ERNSEN_MODE_MAX 错误模式 -
相关数据类型及接口
2.72. MI_IVE_LineFilterHorCtrl_t¶
-
说明
定义 LineFilterHor 控制参数。
-
定义
typedef struct MVE_IVE_LineFilterHorCtrl_s { MI_U8 u8GapMinLen; MI_U8 u8DensityThr; MI_U8 u8HorThr; } MVE_IVE_LineFilterHorCtrl_t;
-
成员
成员名称 描述 u8GapMinLen 最小线段长度,详情请看 MI_IVE_LineFilterHor中的 thr1 范围 : [1, 20] u8DensityThr 密度阀值,详情请看 MI_IVE_LineFilterHor中的 thr2 范围 : [1, 50] u8HorThr 水平线段长度阀值,详情请看 MI_IVE_LineFilterHor 中的 thr3 范围 : [1, 50]
2.73. MI_IVE_LineFilterVerCtrl_t¶
-
说明
定义 LineFilterVer 控制参数。
-
定义
typedef struct MVE_IVE_LineFilterVerCtrl_s { MI_U8 u8VerThr; } MVE_IVE_LineFilterVerCtrl_t _t;
-
成员
成员名称 描述 u8VerThr 垂直线段长度阀值,详情请看 MI_IVE_LineFilterVer 中的 thr 范围 : [1, 64]
2.74. MI_IVE_NoiseRemoveHor_t¶
-
说明
定义 NoiseRemoveHor 控制参数。
-
定义
typedef struct MVE_IVE_NoiseRemoveHorCtrl_s { MI_U8 u8HorThr; MI_U8 u8HorThrMax; } MVE_IVE_NoiseRemoveHorCtrl_t;
-
成员
成员名称 描述 u8HorThr 决定水平噪声的线段长度阀值,详情请看 MI_IVE_NoiseRemoveHor 中的 thr1 范围 : [1, 100] u8HorThrMax 决定水平噪声的最大线段长度阀值,详情请看 MI_IVE_NoiseRemoveHor 中的 thr2 范围 : [1, 100] -
注意事项
u8HorThrMax 一定大于 u8HorThr。
2.75. MI_IVE_NoiseRemoveVer_t¶
-
说明
定义 NoiseRemoveVer 控制参数。
-
定义
typedef struct MVE_IVE_NoiseRemoveVerCtrl_s { MI_U8 u8VerThr; MI_U8 u8VerThrMax; } MVE_IVE_NoiseRemoveVerCtrl_t;
-
成员
成员名称 描述 u8VerThr 决定垂直噪声的线段长度阀值,详情请看 MI_IVE_NoiseRemoveVer中的 thr1 范围 : [1, 100] u8VerThrMax 决定垂直噪声的最大线段长度阀值,详情请看 MI_IVE_NoiseRemoveVer 中的 thr2 范围 : [1, 100] -
注意事项
u8VerThrMax一定大于 u8VerThr。
2.76. MI_IVE_AdpThreshCtrl_t¶
-
说明
定义 AdpThresh 控制参数。
-
定义
typedef struct MVE_IVE_AdpThreshCtrl_s { MI_U8 u8RateThr; MI_U8 u8HalfMaskx; MI_U8 u8HalfMasky; MI_U8 s16Offset; MI_U8 u8ValueThr; } MVE_IVE_AdpThreshCtrl_t;
-
成员
成员名称 描述 u8RateThr 阀值比例,详情请看 MI_IVE_AdpThresh 中的 RateThr
范围: [1, 20]u8HalfMaskx 窗口宽的一半,详情请看MI_IVE_AdpThresh中的 w
范围: [1, 40]u8HalfMasky 窗口高的一半,详情请看MI_IVE_AdpThresh 中的 h
范围: [1, 40]s16Offset 偏移量,详情请看 MI_IVE_AdpThresh中的 offset
范围: [-128, 127]u8ValueThr 像素阀值,详情请看 MI_IVE_AdpThresh中的 ValueThr
范围: [1, 255]
2.77. MI_IVE_ResizeCtrl_t¶
-
说明
定义 Resize 控制参数。
-
定义
typedef struct _MVE_IVE_ResizeCtrl_s { MVE_IVE_ResizeMode_e enMode; } MVE_IVE_ResizeCtrl_t;
-
成员
成员名称 描述 enMode 输入图像模式 -
相关数据类型及接口
2.78. MI_IVE_ResizeMode_e¶
-
说明
定义 Resize 输入模式。
-
定义
typedef enum { E_MI_IVE_RESIZE_TYPE_U8C1 = 0x0, E_MI_IVE_RESIZE_TYPE_U8C3_PLANAR = 0x1, E_MI_IVE_RESIZE_TYPE_U8C3_PACKAGE = 0x2, E_MI_IVE_RESIZE_TYPE_YUV420SP = 0x3, E_MI_IVE_RESIZE_TYPE_MAX } MVE_IVE_ResizeMode_e;
-
成员
成员名称 描述 E_MI_IVE_RESIZE_TYPE_U8C1 输入图像的每个像素用 1 个 8bit 无符号数据表示单通道图像 E_MI_IVE_RESIZE_TYPE_U8C3_PLANAR 输入图像的每个像素用 3 个 8bit 无符号数据表示 1 个像素的 3 通道图像,且以 planar 格式存储。 E_MI_IVE_RESIZE_TYPE_U8C3_PACKAGE 输入图像的每个像素用 3 个 8bit 无符号数据表示且以 package 格式存储 3 通道图像。 E_MI_IVE_RESIZE_TYPE_YUV420SP 输入为 YUV420 Semiplanar 格式的图像。 E_MI_IVE_RESIZE_TYPE_MAX 错误模式 -
相关数据类型及接口
2.79. MI_IVE_BatCtrl_t¶
-
说明
定义 BAT 控制参数。
-
定义
typedef struct _MVE_IVE_BatCtrl_s { MVE_IVE_BatMode_e enMode; MI_U16 _t u16HorTimes; MI_U16 _t u16VerTimes; } MVE_IVE_BatCtrl_t;
-
成员
成员名称 描述 enMode 输入图像模式 u16HorTimes 水平侦测阀值 u16VerTimes 垂直侦测阀值 -
相关数据类型及接口
2.80. MI_IVE_BatMode_e¶
-
说明
定义 Bat 运算模式。
-
定义
typedef enum { E_MI_IVE_BAT_OUT_CTRL_BOTH = 0x0, E_MI_IVE_BAT_OUT_CTRL_HOR = 0x1, E_MI_IVE_BAT_OUT_CTRL_VER = 0x2, E_MI_IVE_BAT_OUT_CTRL_MAX } MVE_IVE_BatMode_e
-
成员
成员名称 描述 E_MI_IVE_BAT_OUT_CTRL_BOTH 水平和垂直共同模式 E_MI_IVE_BAT_OUT_CTRL_HOR 水平模式 E_MI_IVE_BAT_OUT_CTRL_VER 垂直模式 E_MI_IVE_BAT_OUT_CTRL_MAX 错误模式 -
相关数据类型及接口
2.81. MI_IVE_AccCtrl_t¶
-
说明
定义 Acc 控制参数。
-
定义
typedef struct MVE_IVE_AccCtrl_s { MVE_IVE_AccMode_e enMode; } MVE_IVE_AccCtrl_t;
-
成员
成员名称 描述 enMode 输入图像模式 -
相关数据类型及接口
2.82. MI_IVE_AccMode_e¶
-
说明
定义 Acc 运算模式。
-
定义
typedef enum { E_MI_IVE_ACC_MODE_INCREASE = 0x0, E_MI_IVE_ACC_MODE_DECREASE = 0x1, E_MI_IVE_ACC_MODE_INCREASE_MAP_255TO1 = 0x2, E_MI_IVE_ACC_MODE_MAX } MVE_IVE_AccMode_e
-
成员
成员名称 描述 E_MI_IVE_ACC_MODE_INCREASE 累积增加模式 E_MI_IVE_ACC_MODE_DECREASE 累积减少模式 E_MI_IVE_ACC_MODE_INCREASE_MAP_255TO1 累计增加,且 255 转换为 1 模式 E_MI_IVE_BAT_OUT_CTRL_MAX 错误模式 -
相关数据类型及接口
2.83. MI_IVE_MatrTranfMode_e¶
-
说明
定义 matrix_transform 的输入信道模式。
-
定义
typedef enum { E_MI_IVE_MATRIX_TRANSFORM_TYPE_C1 = 0x0, E_MI_IVE_MATRIX_TRANSFORM_TYPE_C2 = 0x1, E_MI_IVE_MATRIX_TRANSFORM_TYPE_C3 = 0x2, E_MI_IVE_MATRIX_TRANSFORM_TYPE_MAX }MVE_IVE_MatrTranfMode_e;
-
成员
成员名称 描述 E_MI_IVE_MATRIX_TRANSFORM_TYPE_C1 单一输入图像模式 E_MI_IVE_MATRIX_TRANSFORM_TYPE_C2 两个输入图像模式 E_MI_IVE_MATRIX_TRANSFORM_TYPE_C3 三个输入图像模式 E_MI_IVE_MATRIX_TRANSFORM_TYPE_MAX 错误模式 -
相关数据类型及接口
2.84. MI_IVE_MatrTranfCtrl_t¶
-
说明
定义 matrix_transform 控制参数。
-
定义
typedef struct MI_IVE_MatrTranfCtrl_S { MVE_IVE_MatrTranfMode_e enMode; /*Input channel mode*/ MI_S16 s16MatrixArray[9]; //Official } MI_IVE_MatrTranfCtrl_t;
-
成员
成员名称 描述 enMode 输入信道模式 s16MatrixArray[9] 矩阵系数 -
注意事项
若 enMode = E_MI_IVE_MATRIX_TRANSFORM_TYPE_C1, 则只需输入 s16MatrixArray[0] 即可
若 enMode = E_MI_IVE_MATRIX_TRANSFORM_TYPE_C2, 则只需输入 s16MatrixArray[0] ~ s16MatrixArray[3] 即可
若 enMode = E_MI_IVE_MATRIX_TRANSFORM_TYPE_C23, 则全部矩阵系数都需输入
-
相关数据类型及接口
2.85. MI_IVE_SHIFT_DETECT_MODE_e¶
-
说明
定义 shift detector 的追踪检测模式。
-
定义
typedef enum
{
E_MI_IVE_SHIFT_DETECT_MODE_SINGLE = 0x0, E_MI_IVE_SHIFT_DETECT_MODE_MULTI = 0x1, E_MI_IVE_SHIFT_DETECT_MODE_MAX
}MVE_IVE_MatrTranfMode_e;
-
成员
成员名称 描述 E_MI_IVE_SHIFT_DETECT_MODE_SINGLE 单一物件追踪模式 E_MI_IVE_SHIFT_DETECT_MODE_MULTI 全域物件追踪模式 E_MI_IVE_SHIFT_DETECT_MODE_MAX 错误模式 -
相关数据类型及接口
2.86. MI_IVE_SHIFT_DETECT_CTRL_t¶
-
说明
定义 shift detector控制参数。
-
定义
typedef struct MVE_IVE_SHIFT_DETECT_CTRL_S { MVE_IVE_SHIFT_DETECT_MODE_e enMode; MI_U8 pyramid_level; MI_U8 search_range; MI_U16 u16Left; MI_U16 u16Top; MI_U16 u16Width; MI_U16 u16Height; } MI_IVE_SHIFT_DETECT_CTRL_t;
- 成员
成员名称 描述 enMode 输入通道模式 pyramid_level 金字塔大小 search_range 搜索范围 u16Left 目标左上X方向位置 u16Top 目标左上Y方向位置 u16Width 目标区域宽度 u16Height 目标区域高度 -
注意事项
若 enMode = E_MI_IVE_SHIFT_DETECT_MODE_SINGLE, u16Width与u16Height代表目标区域的宽高。
若 enMode = E_MI_IVE_SHIFT_DETECT_MODE_MULTI, u16Width与u16Height则代表全域追踪时的方块大小。
-
相关数据类型及接口
3. 错误码¶
智能加速引擎 API 错误码如下表所示。
表3-1 智能加速引擎 API 错误码
| 错误代码 | 宏定义 | 描述 |
|---|---|---|
| 0xA0002001 | MI_IVE_ERR_INVALID_DEVID | 设备 ID 超出合法范围 |
| 0xA0002002 | MI_IVE_ERR_INVALID_CHNID | 通道组号错误或无效区域句柄 |
| 0xA0002003 | MI_IVE_ERR_ILLEGAL_PARAM | 参数超出合法范围 |
| 0xA0002004 | MI_IVE_ERR_EXIST | 重复执行已存在的设备、通道或资源 |
| 0xA0002005 | MI_IVE_ERR_UNEXIST | 试图使用或者销毁不存在的设备、通道或者资源 |
| 0xA0002006 | MI_IVE_ERR_NULL_PTR | 函数参数中有空指针 |
| 0xA0002007 | MI_IVE_ERR_NOT_CONFIG | 模块没有配置 |
| 0xA0002008 | MI_IVE_ERR_NOT_SUPPORT | 不支持的参数或者功能 |
| 0xA0002009 | MI_IVE_ERR_NOT_PERM | 该操作不允许,如试图修改静态配置参数 |
| 0xA000200C | MI_IVE_ERR_NOMEM | 分配内存失败,如系统内存不足 |
| 0xA000200D | MI_IVE_ERR_NOBUF | 分配缓存失败,如申请的图像缓冲区太大 |
| 0xA000200E | MI_IVE_ERR_BUF_EMPTY | 缓冲区中无图像 |
| 0xA000200F | MI_IVE_ERR_BUF_FULL | 缓冲区中图像满 |
| 0xA0002010 | MI_IVE_ERR_SYS_NOTREADY | 系统没有初始化或没有加载相应模块 |
| 0xA0002011 | MI_IVE_ERR_BADADDR | 地址非法 |
| 0xA0002012 | MI_IVE_ERR_BUSY | 系统忙 |
| 0xA0002013 | MI_IVE_ERR_CHN_NOT_STARTED | 系统未开始 |
| 0xA0002014 | MI_IVE_ERR_CHN_NOT_STOPED | 系统未停止 |
| 0xA0002015 | MI_IVE_ERR_NOT_INIT | 没有初始化 |
| 0xA0002019 | MI_IVE_ERR_SYS_TIMEOUT | 系统超时 |
| 0xA000201F | MI_IVE_ERR_FAILED | 函数执行错误 |