SDK架构介绍
1. 模块介绍¶
| 简称 | 全称 | 职责 |
|---|---|---|
| AEC | Acoustic Echo Cancellation | 回声消除,抑制远程回声的算法 |
| AED | Acoustic Event Detection | 声学事件检测,用于在音讯码流中侦测特定的声音事件 |
| AI | Audio Input Interface | audio input采集单元 |
| AO | Audio Output Interface | 音频输出 |
| APC | Audio Process Chain | 音频处理链路,包含降噪、均衡器和自动增益控制的算法组合 |
| BF | beamforming | 波束形成或空间滤波,用于传感器数组的定向信号处理技术传输或接收 |
| CIPHER | Cipher | 提供数据的加解密功能,包括 AES\RSA\SHA 加解密算法 |
| DISP | Display Engine | DISP对VDEC/SCL 处理单元输出的图像做硬件拼图,并连同AO输出音频信号一起编码成HDMI/VGA/CVBS 输出信号的单元 |
| FB | FrameBuffer | UI显示 |
| GFX | Graphics Engine | Graphic Engine 提供对2D画图的基本硬件加速支持,降低CPU的负荷 |
| HDMI | High Definition Multimedia Interface | HDMI/VGA标准输出 |
| IPU | Intelligent Process Unit | 智能处理器,模块实现了AI 模型的推演功能加速 |
| IQSERVER | Image Quality tuning Server | 图像质量调校服务,用来完成调校工具(IQ Tool)和开发板之间的数据通信, 包括 ISP 参数设置,获取图像,上传/下载相关文件等功能 |
| ISP | Image Signal Processing | 实现 HDR,3D/2D 降噪,3A 算法,WDR 等相关功能 |
| IVE | Intelligent Video Engine | 提供图形智能识别算法中的基本算子支持 |
| JPD | Jpeg Decoder | Jpeg解码器 |
| RGN | Region | 区域管理模块,对SCL数据进行遮挡或叠加 |
| SCL | Scaler | 缩放/裁剪/格式转换等功能 |
| SED | Smart Encode | 智能编码,主要提供智能编码通道的创建和销毁、开启和停止检测源图像、计算结果并关联到指定的编码通道等功能 |
| SNR | Sensor | 获取摄像头接口信息、调整分辨率和帧率等功能 |
| SRC | Sample Rate Conversion | 重采样,用于对音频流做采样频率转换 |
| SSL | Sound Source Localization | 声源定位,用于定位声音来源的方向 |
| SYS | System | 实现MI系统初始化、内存管理、各个模块之间数据流的管理 |
| VDEC | Video Decoder | H264/H265 视频解码器 |
| VDF | Video Detection Framework | 整合各个视频算法识别库的中间件架构,包括MD/OD/VG |
| VDISP | Vitrual Display | 软件拼图 |
| VENC | Video Encoder | H264/H265/MotionJpeg编码器 |
| VIF | VIDEO Input Interface | BT656/BT1120信号采集单元 |
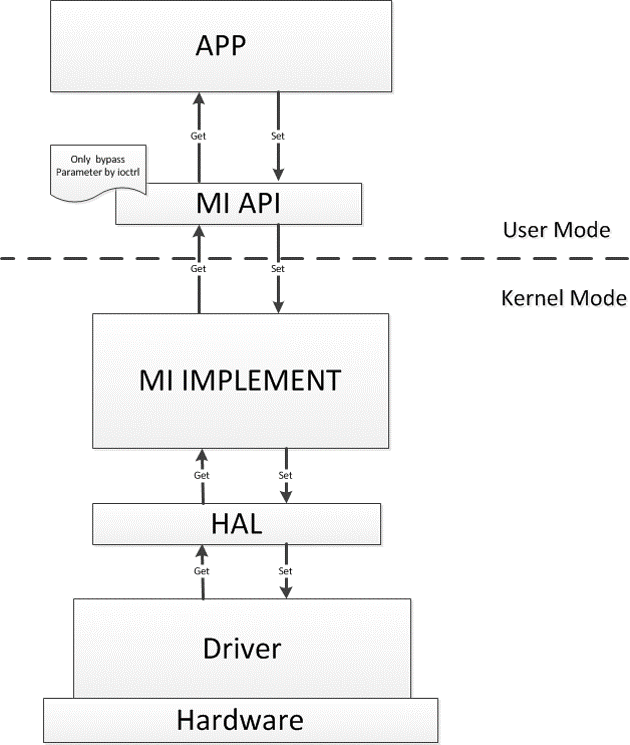
2. 软件架构¶
-
功能实现函数从上到下,分为MI API层,MI实现层,HAL硬件抽象层,Driver层和芯片硬件层。
-
MI IMPLEMENT和HAL层以ko形式给出,MI API以lib库的形式给出。
-
SDK功能代码在Kernel层实现,减少从kernel到User mode来回调度,提高逻辑函数实现的效率。
-
对上层用户提供MI API的User Mode接口,用户层APP直接调用MI接口,即可调用到对应的MI功能。
3. SDK目录结构¶
| 模块名 | 功能 | |
|---|---|---|
| project | board | PCB板信息存放路径 |
| configs | 预配置文件存放路径 | |
| image | 产生镜像文件的材料库和镜像文件存放处 | |
| kbuild | kernel编译环境 | |
| release | 目标池,存放对外头文件,库文件和内核模块以及第三方库 | |
| scripts | 编译辅助功能脚本 | |
| tools | 通用工具 | |
| sdk | verify/feature | 验证文件夹,存放模块单元测试和特性测试文件 |
| verify/demo | 整体功能测试demo |
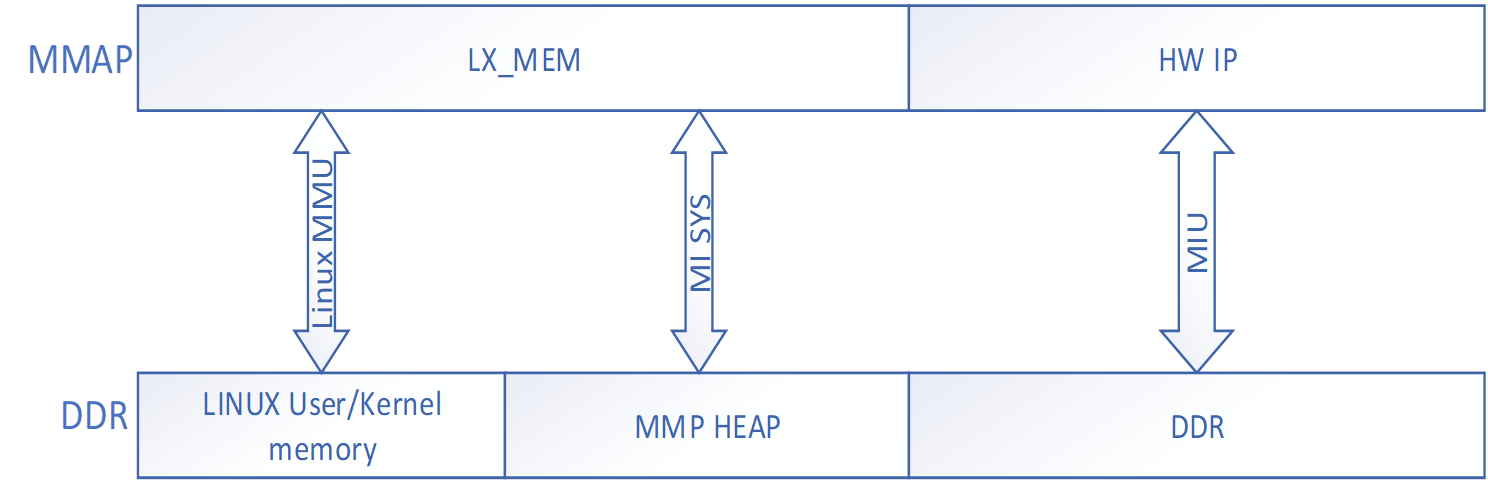
4. 内存管理¶
详细请参考Memory Layout。
4.1. 内存分配方式¶
-
通过
mmap.ini预留的内存(已很少使用) -
支持mma管理module内存,各个module从mma预留的size中分配
环境变量设置预留内存用量:
/ # cat /proc/cmdline ubi.mtd=ubi0,2048 root=/dev/mtdblock8 rootfstype=squashfs ro init=/linuxrc LX_MEM=0x3ffe0000 mma_heap=mma_heap_name0,miu=0,sz=0x1F000000 mma_memblock_remove=1 cma=2M@0x23800000 mmap_reserved=fb,miu=0,sz=0x800000,max_start_off=0x3F000000,max_end_off=0x3F800000 mtdparts=nand0:768k@0x140000(IPL0),384k(IPL_CUST0),384k(IPL_CUST1),384k(UBOOT0),384k(UBOOT1), 256k(ENV),5m(KERNEL),5m(RECOVERY),6m(rootfs),384k(MISC),-(ubi0)
-
LX_MEM为
mmap.ini剩余给LX部分的内存,所有DDR内存只有极少部分在mmap.ini预留,其它都分配给LX;环境变量中LX_MEM必须与/config/mmap.ini中E_LX_MEM_LEN内存保持一致,否则加载mi_sys.ko会报错。 -
mma_heap后的sz带的参数是预留给sdk使用的总内存;大小需要根据产品规格评估。
-
mmap_reserved=fb后面是预留的一块给logo显示用的内存,mmap_reserved后的sz带的参数是预留内存大小,等于
/config/mmap.ini中E_LX_LOGO_RESERVED_FB_LEN大小,max_start_off等于/config/mmap.ini中E_LX_LOGO_RESERVED_FB_ADR,max_end_off等于E_LX_LOGO_RESERVED_FB_ADR + E_LX_LOGO_RESERVED_FB_LEN;这块内存在FB初始化后会自动释放归还给LX。 -
cma=2M@0x23800000是预留cma内存的大小和地址,2M为size,0x23800000为地址(带地址是为了防止被分配到高端内存,EMAC硬件不吃高端内存),注意这里的地址是带上偏移ARM_MIU0_BUS_BASE(0x20000000)的,也就是0x23800000的实际地址是0x3800000。
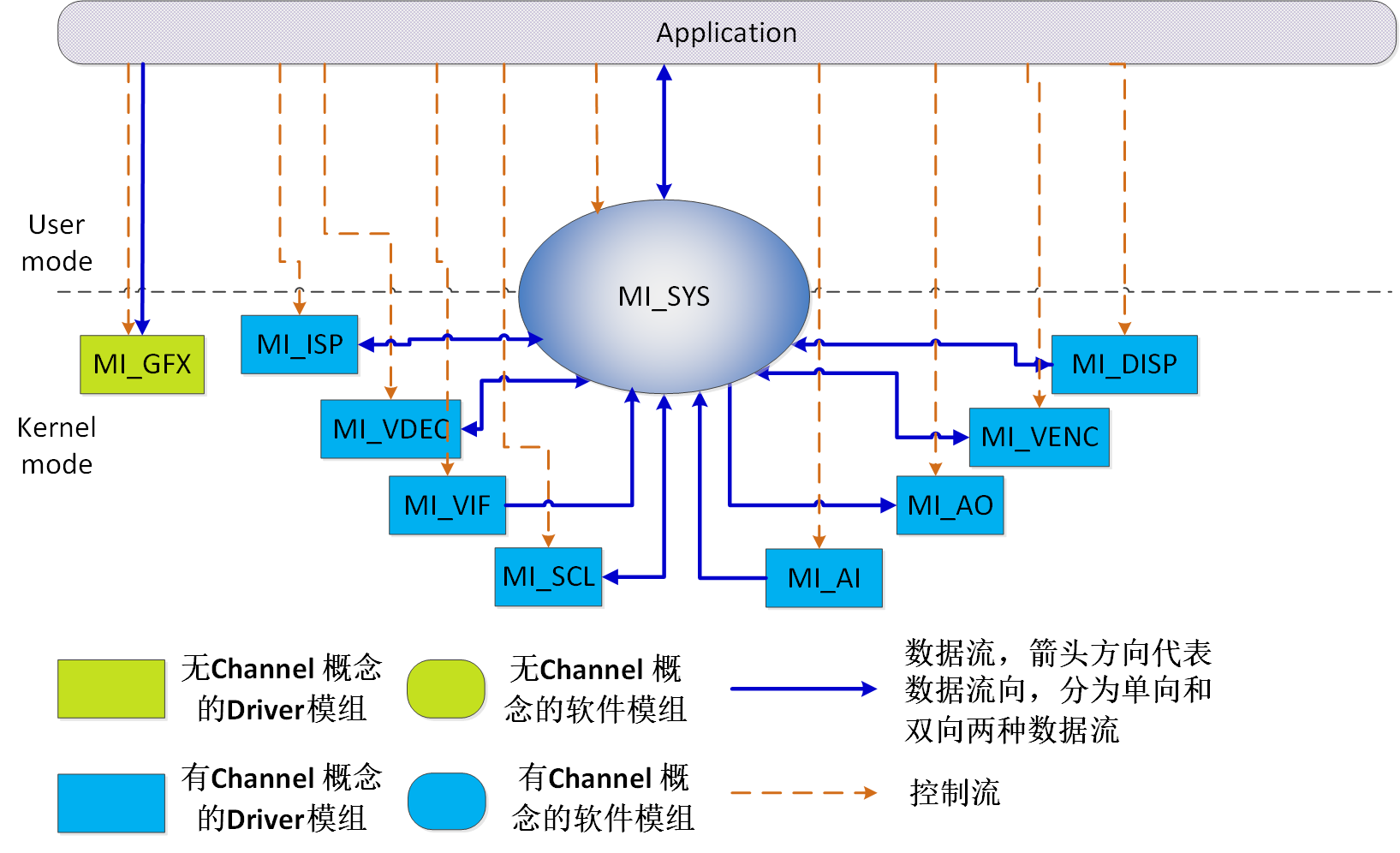
5. 基本概念¶
-
数据流
各个MI Module 可以看成是一个纯数据处理单元,数据流推送由MI SYS内部统一调度。输入数据流表示该数据单元的input数据,输出数据流表示该处理单元处理过的output数据。
-
控制流
APP 对各个MI Module 数据处理过程进行参数控制的过程,比如设置MI_VDEC解码参数,启动停止MI_VDEC 通道,设置MI_VDEC通道输出端口之分辨率及format等。
-
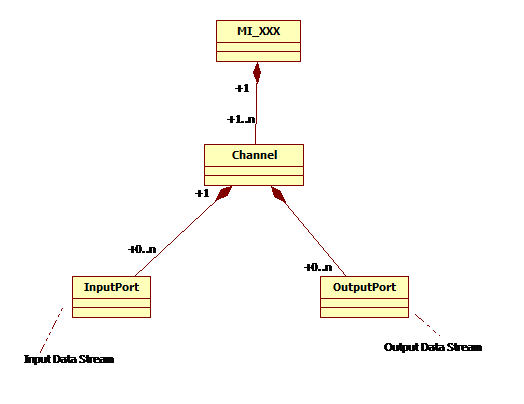
Channel(通道)
-
对于需要处理或者输出stream的MI模组,一个channel代表该MI 模组处理或者输出一路stream的分时复用的上下文(context)及相关控制流设定
-
对于可分时复用的模组,如MI_VDEC, MI_DIVP, MI_DISP,可支持多个channel
-
-
Port(端口)
-
Port分为input port和output port。input port为channel输入数据流的位置,output port则是channel输出数据流的位置。
-
一个channel可以有多个input port及多个output port.
-
6. NVR & XVR架构¶
6.1. 软件架构¶
-
AI/AO/AO/GFX/HDMI都是相对独立的模块,不需要和其它模块串接。
-
NVR最重要的是解码显示流程,一般VDEC->DISP即可,某些流程还需要再串接一级SCL,即VDEC->SCL->DISP。
-
XVR主要包括回放流程(和NVR一致),预览流程(VIF->ISP->SCL->DISP)和存储流程(VIF->ISP->SCL->VENC)。
6.2. NVR常见数据流¶
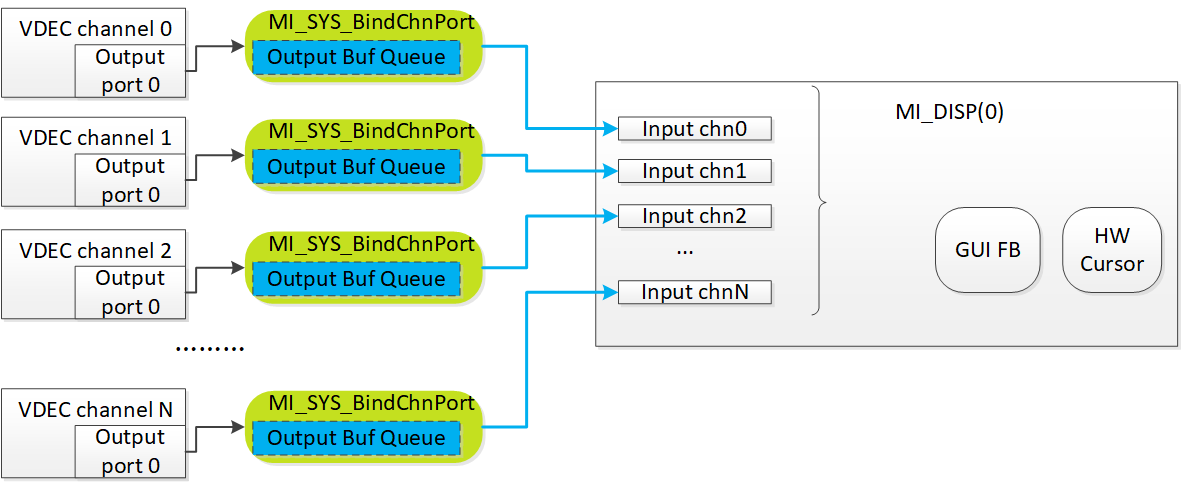
6.2.1. 解码显示¶
VDEC channel只有output,DISP channel只有input,一般解码显示只需要将VDEC chn绑定到DISP chn即可,port口都为0。
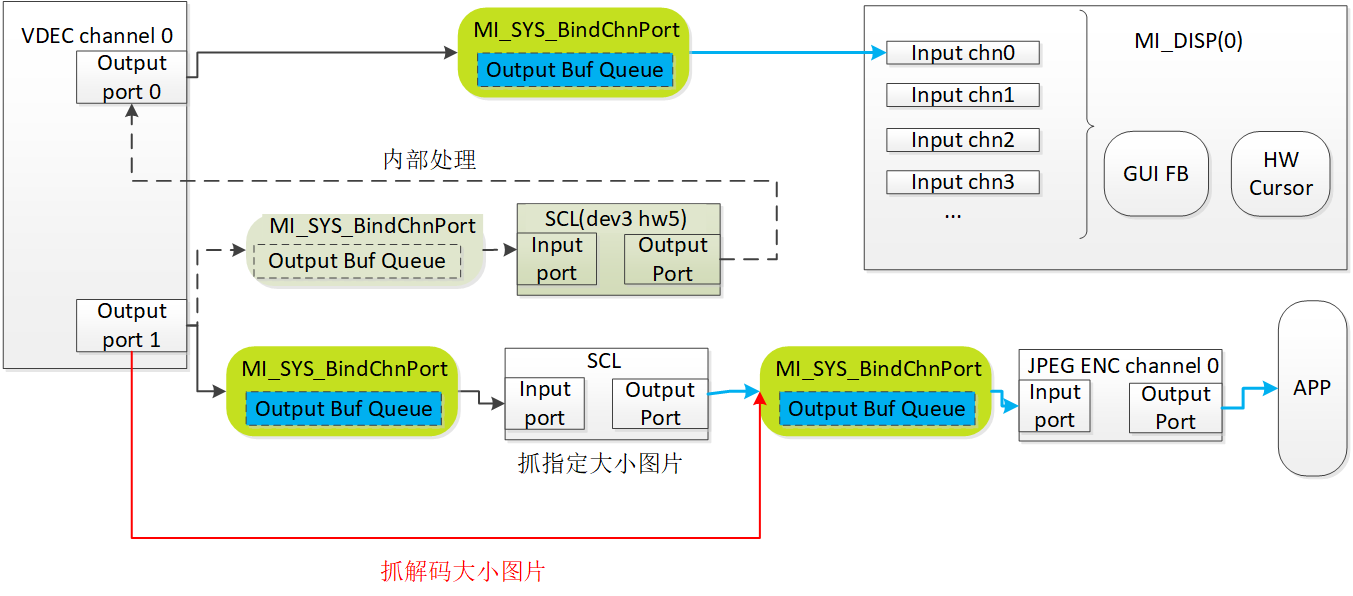
6.2.2. 抓图¶
-
由于VDEC解码出来的图像往往是已经缩放到DISP显示的size,不能满足抓图的需求,所以内部做了处理。
-
默认会解码出原始size图像到port1,然后内部将port1(通过SCL dev3 hw5)缩小到DISP size到port0,port0再绑定DISP去显示。
-
port1的数据可以直接用于抓图,如果抓原始size图片可以直接port1绑定到VENC。
-
如果要抓指定size图片,可以将VDEC port1先绑定一个SCL(dev hw不限)做缩放,然后SCL绑定VENC编码成图片。
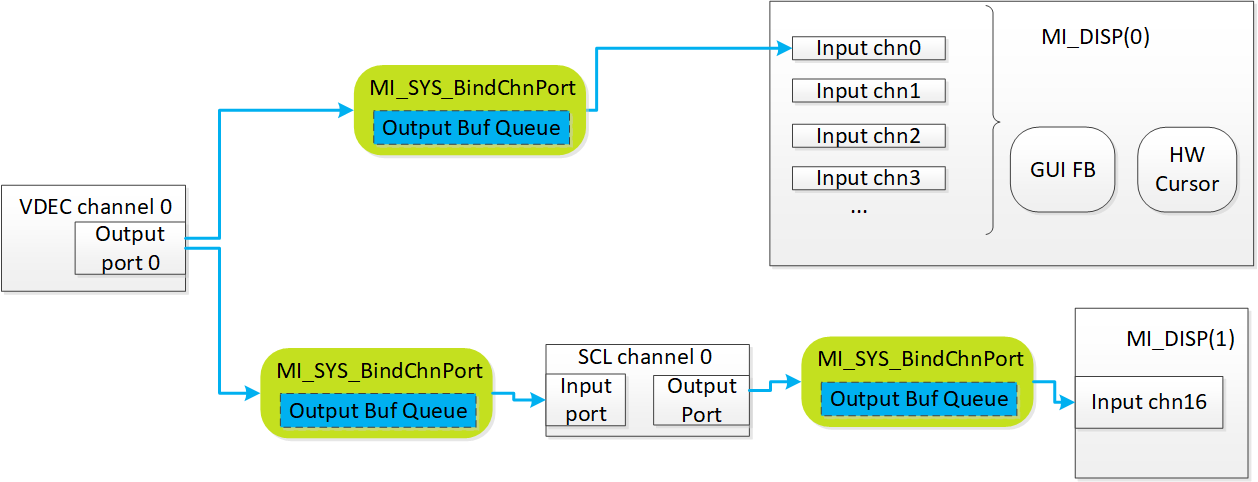
6.2.3. PIP¶
-
DISP有两层layer,layer0 有16个chn,layer1有1个chn,用于PIP显示,通道号固定为16。
-
由于一般PIP窗口都比较小,所以会直接从VDEC chn绑定SCL做缩放,然后SCL绑定PIP DISP显示。
-
layer1永远在layer0上,UI下。
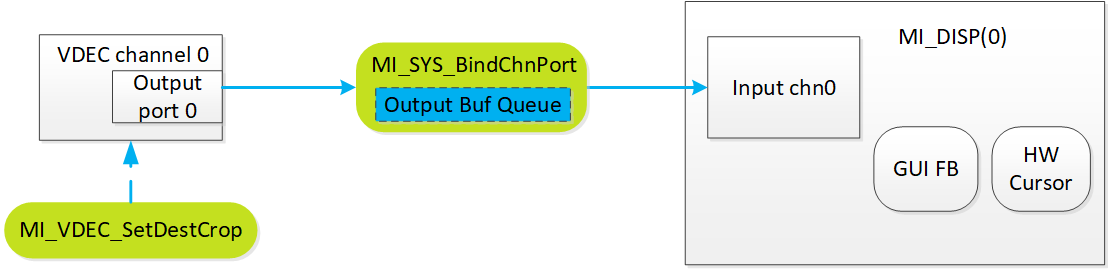
6.2.4. 电子放大¶
-
VDEC,SCL和DISP模块都可以做crop,走SCL模块则会多耗一级内存和带宽。
-
DISP窗口小于VDEC size的情况下,走DISP crop则会对清晰度打折扣,所以NVR上只建议用VDEC做crop。
6.3. XVR常见数据流¶
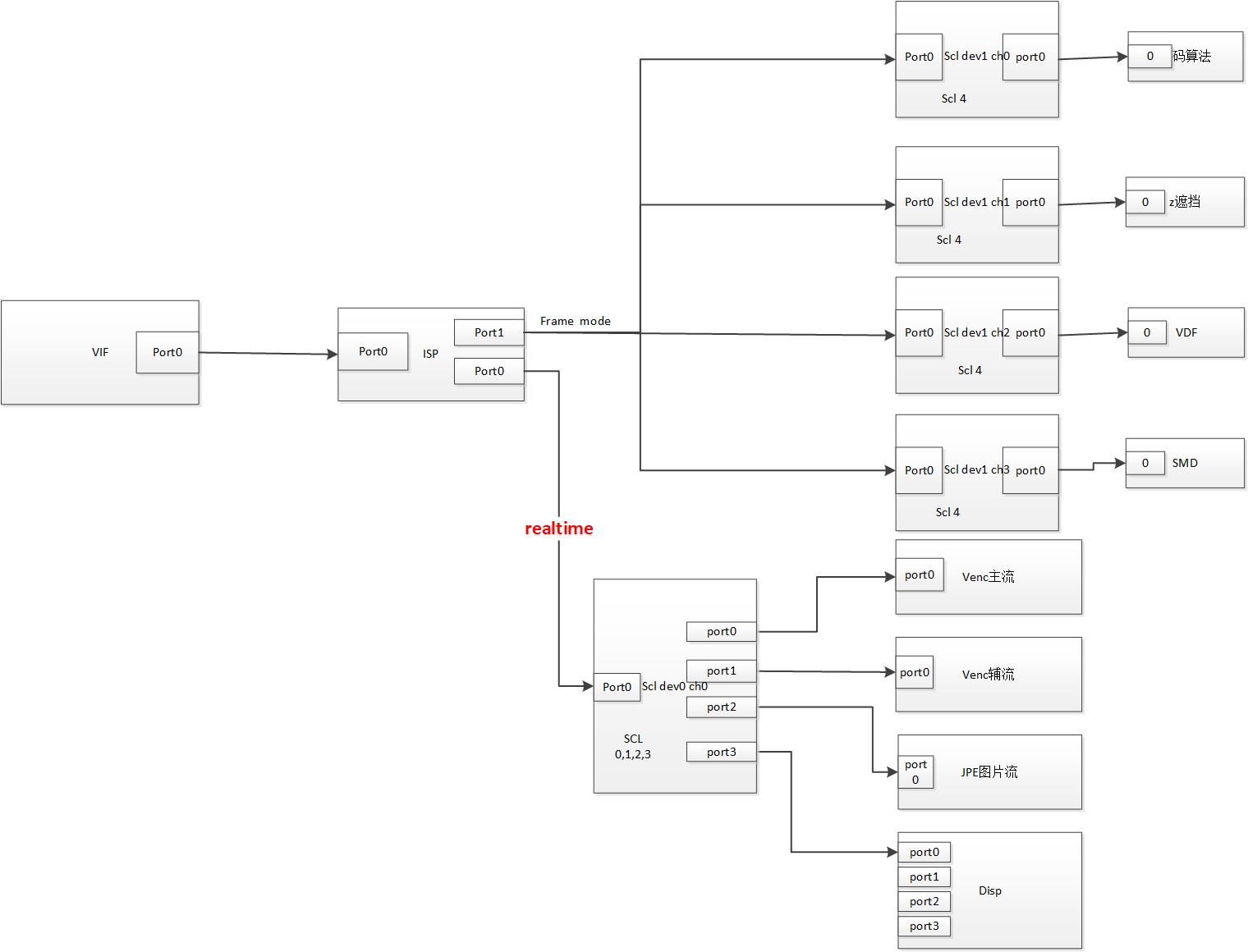
6.3.1. pipeline参考¶
模块串接可以有多种,有的更省频宽,有的更省内存,下图是推荐使用的pipeline(只列出其中1路VIF->ISP->SCL->VENC或DISP的流程,其它路相同),已经是最节省内存的方案,而且用户层串接也相对比较简单,用户只需根据自己的实际场景做微调。
注意ISP和SCL绑定尽量使用realtime模式(ISP output port0),可以节省内存和带宽。在SCL硬件数量不够的情况下再考虑用framemode绑定(ISP output port1),尽量让分辨率低帧率低的流程走framemode。
6.3.2. 电子放大¶
XVR电子放大有2种:
-
回看电子放大,方案和NVR一样,VDEC做crop即可。
-
预览电子放大,流程是VIF->ISP->SCL->DISP,因为SCL可能有多个output port,因此建议在SCL的output做crop。